Inscription / Connexion Nouveau Sujet
Dynamique de rotation 4
Bonjour, je recherche une aide pour cet exercice.
Exercice : Une tige homogène AB de masse M, de longueur l peut tourner autour d'un axe horizontal  fixe passant par son milieu O.
fixe passant par son milieu O.
En A et B sont fixées respectivement des masses ponctuelles mA et mB.
On donne : mA = M/3 ; mB = M/6 ; l = 20 cm ; g = 10 SI.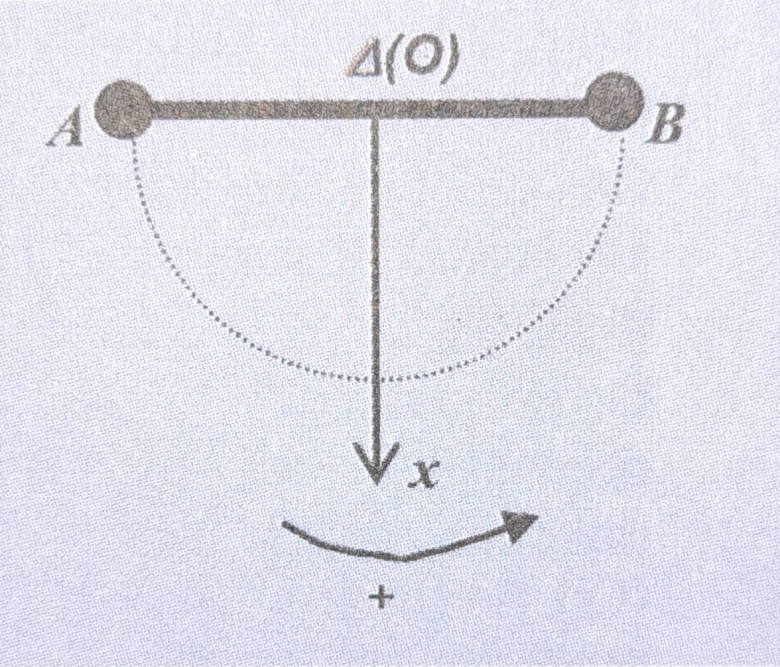
1) Donner l'expression de la distance OG du point O au centre de gravité G de l'ensemble.
2) La tige initialement horizontale est lâchée sans vitesse initiale.
a) Établir une relation entre l'accélération angulaire  " du système et l'angle que fait la demi-verticale Ox prise comme référence avec la demi droite OA.
" du système et l'angle que fait la demi-verticale Ox prise comme référence avec la demi droite OA.
b) Donner l'allure de la courbe " = f()
3) Calculer :
a) l'accélération de la masse fixée en A à l'instant où le système est lâché sans vitesse ;
b) l'accélération de la masse fixée en A à l'instant où la tige passe par la verticale.
Préciser la direction et le sens des vecteurs accélérations correspondants.
Bonjour
Le centre de gravité G est aussi le centre d'inertie.Tu dois connaître la formule du barycentre....
1) Expression de la distance OG
J'utilise une relation barycentrique :
J'introduis le point O...
Mais
Ainsi
En module :
Passer trop tôt au module fait perdre l'information sur le sens du vecteur .
Après simplification :
On démontre ainsi un résultat intuitivement évident : G est du côté de la masse la plus importante puisque mA > mB.
2.a) Relation entre " et
- système : (tige AB + masse A + masse B) ;
- référentiel : terrestre (supposé galiléen)
- bilan des forces : de la masse A ;
de la masse B ;
de la tige AB
NB : sinon je peux dire que le système peut être assimilé à un seul solide de poids appliqué au point G dont le travail autour de l'axe
est :
Maintenant la dérivée membre à membre donne
Puf ! Je ne vois plus
La méthode utilisée est bonne mais tu dois revoir l'expression du travail du poids. Aide-toi d'un schéma soigné. Il est effectivement plus simple de considérer qu'il s'agit d'un seul solide de centre de gravité G.
Puisqu'il y a mouvement, la vitesse angulaire est non nulle à chaque instant. Il est possible de diviser tous les termes de l'équation différentielle par cette vitesse angulaire (même méthode qu'au problème précédent).
Le travail du poids du solide composite est
Avec
Donc
l'énergie cinétique du système à un instant t quelconque est :
Maintenant le Théorème de l'énergie cinétique donne
vanoise, j'obtiens la même chose que mon message précédent
ATTENTION : la première formule du travail que tu utilises n'est valide que si le moment de la force par rapport à l'axe de rotation est constant au cours du mouvement. Cela n'est pas le cas ici. De plus : ton expression du moment du poids est fausse. Revois certaines solutions des exercices précédents.
Pour le travail du poids, le plus simple consiste à l'exprimer en fonction de la différence d'altitude :
W=Mtotale.g.(zinitiale - zfinale)
Commence par faire un schéma soigné et revois les exercices précédents sur les pendules. Tu remarqueras que h s'exprime simplement en fonction de la distance OG et d'une fonction trigonométrique de .
Dommage pour moi, pourtant j'ai corrigé beaucoup de pendule ici, plus difficile que celui-ci.
Je dois faire le schéma.
- l'axe Delta est horizontal et perpendiculaire au plan de la feuille, c'est ça ?
- la barre AB tourne autour de l'axe Delta, c'est ça ?
Maintenant voici mon schéma 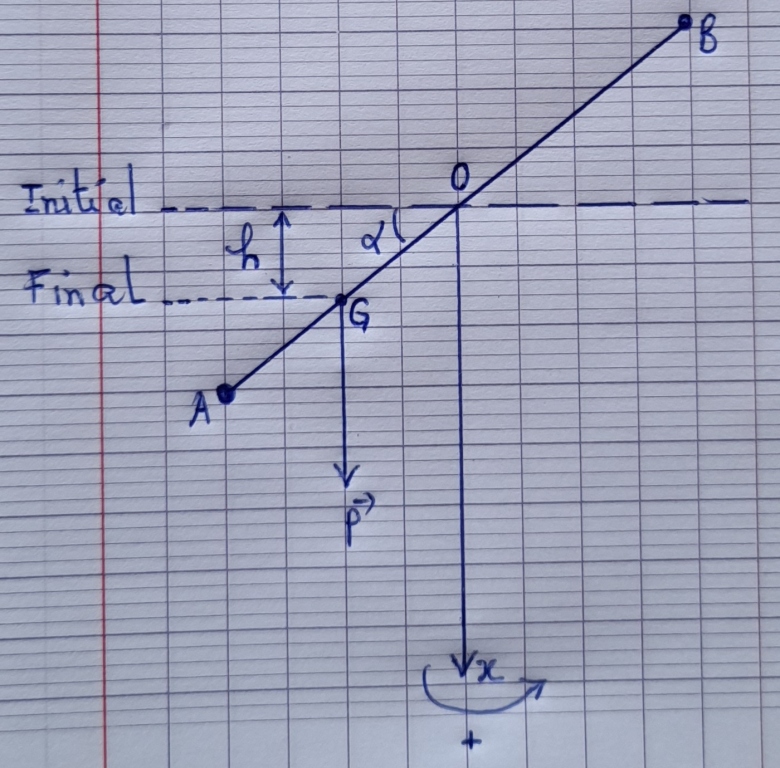
Le travail du poids est
Mais la masse totale est Mt = M + M/3 + M/6 = 3M/2
La hauteur de la chute du poids est
Donc le travail du pois est
Maintenant le Théorème de l'énergie cinétique appliqué au système est :
En dérivant cette dernière relation je trouve ceci
C'est ça ?
D'accord !
Est-ce que je peux continuer en remplaçant J et OG par leurs expressions. On aura enfin une relation plus simplifiée je pense !
D'accord, dans ce cas on a :
OG = l/18 et J = (5/24)Ml² après tout calcul.
Ainsi, en remplaçant dans la relation précédente et après simplification j'obtiens ceci :
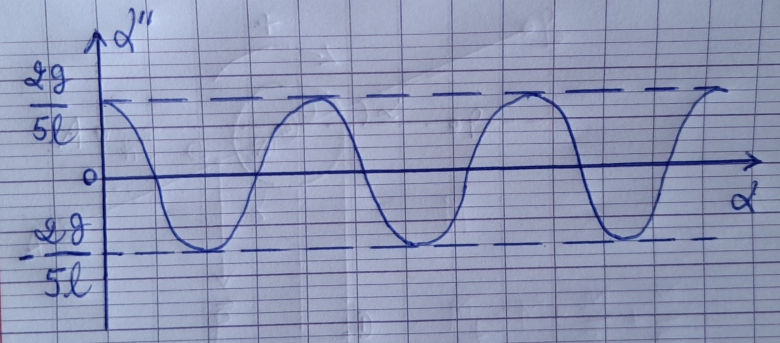
Je dois graduer en respectant la périodicité de la fonction cosinus, c'est-à-dire à chaque période (1 tour complet),  = 2
= 2
Maintenant en partant de l'origine, le 1er point d'intersection de la courbe et l'axe des abscisses je met /2
Pour l'étude graphique d'un phénomène périodique, il faut faire l'étude sur au moins une période (2 ici comme tu l'as écrit), éventuellement un peu plus.Il peut être intéressant de graduer l'axe des abscisses en quart de période. Tu obtiens ainsi successivement un maximum, une valeur nulle, un minimum, une valeur nulle, un maximum, une valeur nulle, ...
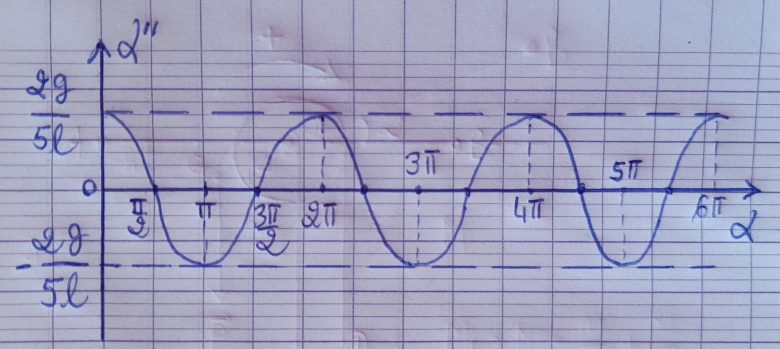
Très bien mais ne pas oublier les unités à côté du symbole de la grandeur portée en abscisse ou en ordonnée.
D'accord.
3.a) Calculons l'accélération de la masse fixée en A à l'instant initial
À l'instant où le système est lâché sans vitesse, je pense bien que l'accélération est nulle.
A ce que je comprends, la question 3 demande le calcul de l'accélération du point A pour =/2 rad. Cela demande de calculer l'accélération tangentielle et l'accélération normale du point A au passage en =/2 rad ...
Donc je reprend.
3.a) A l'instant initial = 0
Alors aT = 0 et aN = 0
3.b) A l'instant où la tige passe par la verticale, = /2 rad.
Or aT = R."
Mais R = l/2 et
En remplaçant par /2, on trouve finalement aT = 0
Maintenant l'accélération normale est aN = v²/R = R. ²
²
Mais = "t
C'est là où je suis bloqué puis t est inconnu...
3a) Ce n'est pas parce que la vitesse initiale est nulle que l'accélération initiale est nulle.Si c'était le cas, il n'y aurait pas de mouvement !
3b) : le théorème de l'énergie cinétique t'as déjà fourni la vitesse angulaire que tu notais .
3.a)
Ce n'est pas parce que la vitesse initiale est nulle que l'accélération initiale est nulle.Si c'était le cas, il n'y aurait pas de mouvement !
3.b) je vais poser les formules de définition que je connais :
aT = dv/(dt) et aN = v²/R
Maintenant je ne connais pas la vitesse linéaire, mais je connais la vitesse angulaire, comme tu l'as dit, grâce au TEc
Maintenant je vais tenter de passer des grandeurs angulaires aux grandeurs linéaires puis remplacer dans les formules de aT et aN. C'est ça ?
3.b) je vais poser les formules de définition que je connais :
aT = dv/(dt) et aN = v²/R
Exact mais puisque : v=R
' :
aT = R.
"
aN = R.(
')2Ah d'accord !
Je reprend donc à partir de la question 3)
Par définition aT = R." et aN = R.²
Avec " = (2gcos)/(5l) ;
² = (3Mg.OG.sin)/(J)
En injectant " et ² dans les expressions de aT et aN, sachant que OG = l/18 et J = (5/25)Ml² on obtient :
et
Or R = OA = l/2
Soit et
3.a) A l'instant où le système est lâché sans vitesse, = 0, donc aN = 0 et aT = 2 m/s².
Alors a = aT = 2 m/s².
3.b) A l'instant où la tige passe par la verticale, = /2 rad.
Donc aT = 0 et aN = 4 m/s².
D'où a = aN = 4 m/s².
C'est ça ?
Direction et sens des vecteurs accélérations correspondants
À l'instant où le système est abandonné sans vitesse, le vecteur accélération est porté par la tangente à la trajectoire de la masse fixée en A et est orienté dans le sens positif du mouvement. Plus simple : est vertical descendant.
À l'instant où la tige passe par la verticale, le vecteur accélération est porté par la normale à la trajectoire de la masse fixée en A et est centripète. Plus simple : est vertical ascendant.
En dérivant cette dernière relation je trouve ceci
C'est ça ?
Bonjour, j'ai une question par rapport au dérivation. Pourquoi il n'y a pas de
du côté du J ?Bonsoir aua
Je n'ai plus trop ce problème en tête mais je veux bien t'expliquer le passage de : à l'expression de l'accélération angulaire. Dans ce contexte, je préfère noter
' la vitesse angulaire plutôt que : . La méthode consiste à dériver par rapport au temps les deux termes de l'égalité, ce qui va fournir une nouvelle égalité.
Ainsi :
La dérivée de sin() par rapport à est bien cos() mais il s'agit ici de calculer la dérivée de sin() par rapport à t sachant que varie en fonction de t. Tu tombes sur un problème de math connu sous le nom de dérivée de fonction composée.
C'est la même chose pour l'autre terme : la dérivée de par rapport à
' est bien 2' mais on recherche la dérivée par rapport à t !
Donc :
Il s'agit ici d'étudier un mouvement de rotation ; la vitesse angulaire n'est donc pas nulle à chaque instant ; il est possible de diviser à droite et à gauche par la vitesse angulaire. Ainsi :
D'accord, dans ce cas on a :
OG = l/18 et J
= (5/24)Ml² après tout calcul.
Ainsi, en remplaçant dans la relation précédente et après simplification j'obtiens ceci :
Pour trouver le J
= mA((l/2)-OG)²+mB((l/2)+OG)²+1/12(Ml²) c'est ça ?Bonjour,
Juste en passant :
a) Établir une relation entre l'accélération angulaire theta" du système et l'angle que fait la demi-verticale Ox prise comme référence avec la demi droite OA.
J'ai bien l'impression que l'angle choisi pour faire les calculs n'est pas celui imposé par l'énoncé.
Bonjour Candide,
J'ai bien l'impression que l'angle choisi pour faire les calculs n'est pas celui imposé par l'énoncé.
C'est vrai que hdiallo a pas mal jonglé entre les
et les dans ce problème même s'il faisait une figure pour expliquer les changement. Cela n'est pas trop conseillé mais le but de ce dernier message concernait juste la dérivation par rapport au temps ! 
Pour trouver le J
= mA((l/2)-OG)²+mB((l/2)+OG)²+1/12(Ml²) c'est ça ?La position du point G importe peu ici dans le calcul du moment d'inertie ; c'est la position de l'axe
qui importe.Pour la tige, l'axe
est perpendiculaire à celle-ci et passe par son milieu :Pour chaque masse ponctuelle, l'expression générale du moment d'inertie est m.r2 où r désigne la distance à l'axe de rotation. Cela conduit à :
Je te laisse faire la somme de ces trois moments d'inertie.

