Inscription / Connexion Nouveau Sujet
Dipôle RLC résonance
Bonjour tout le monde, aidez-moi ici svp
Problème
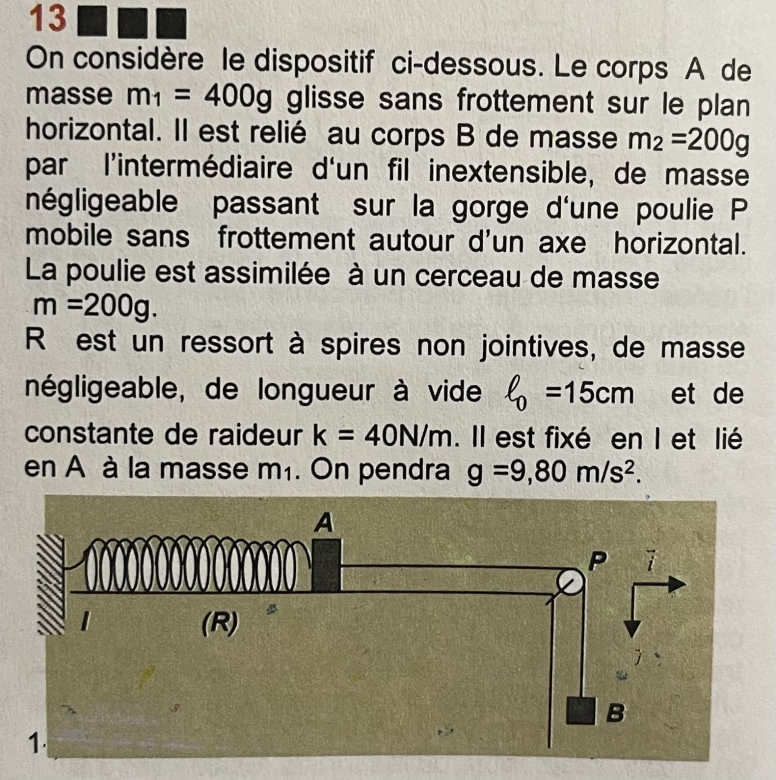
On considère le dispositif ci-dessous. Le corps A de masse m1 = 400 g glissse sans frottement sur le plan horizontal. Il est relié au corps B de masse m2 = 200 g par l'intermédiaire d'un fil inextensible, de masse négligeable passant sur la gorge d'une poulie P mobile sans frottement autour d'un axe horizontal. La poulie est assimilable à un cerceau de masse m = 200 g.
R est un ressort à spires non jointives, de masse négligeable, de longueur à vide l0 = 15 cm et de constante de raideur k = 40 N/kg. Il est fixé en I et lié en A à la masse m1. On prendra g = 9,80 m/s^2.
Remarque :
La question 1) est carrément masquée par la 1ere figure. Ça se trouve ainsi dans le document. Je ne sais pas ce qui a été demandé à ce niveau. Nous pouvons donc commencer par la question 2).
Bonjour
La question 1 concerne sans doute l'étude de l'équilibre, en particulier l'expression de l'allongement  lL du ressort à l'équilibre. Ainsi, pour la suite, la longueur du ressort poura s'écrire :
lL du ressort à l'équilibre. Ainsi, pour la suite, la longueur du ressort poura s'écrire :
L=Lo+L+x avec x : élongation à étudier.
Je te laisse poursuivre.
D'accord.
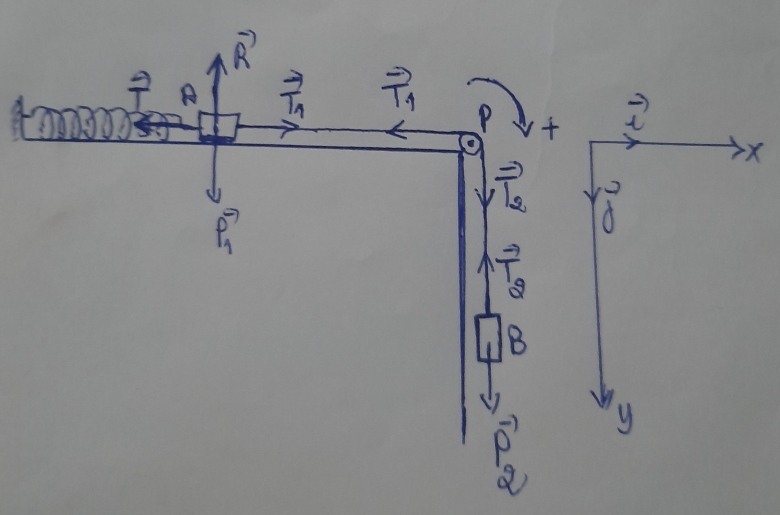
1) Condition d'équilibre
sur le solide A en translation :
Sur l'axe (Ox) : - T + T1 = 0
Donc T1 = T (1)
sur le solide B en translation, je fais la même chose. J'obtiens ceci :
T2 = m2g (2)
sur la poulie P en rotation :
La somme des moments est nulle à l'équilibre. Je trouve ceci :
T2 = T1 (3)
Par identification T = m2g
Alors k.l = m2g est la condition d'équilibre du système (A+B+P)
Ok pour la condition d'équilibre. Tu as pour la suite deux méthodes possibles comme dans l'étude de la machine d'Atwood :
1. Appliquer à chaque solide la rfd ou le théorème des moments (poulie) puis relier les trois équations en considérant la conservation de la tension le long de chaque brin de fil.
2. Écrire l'énergie mécanique du système global puis écrire que celle-ci ne varie pas au cours du temps en absence de frottement.
D'accord.
Question 2) : Equation différentielle du mouvement de À
Je vais appliquer les deux méthodes pour voir 
1ère méthode
sur le solide A en translation :
Sur l'axe (Ox) : - T + T1 = m1a
Alors T1 = m1a + T (1)
sur le solide B en translation, je fais la même chose. J'obtiens ceci :
T2 = m2(g - a) (2)
sur la poulie P en rotation :
La RFD permet d'obtenir ceci :
(T2 - T1).r = J. '' (3)
'' (3)
Mais J = mr2 pour un cerceau.
Maintenant, je remplace T2 et T1 par leurs expressions dans la relation (3), sachant que '' = a/r ; T = kx ; a = x''
D'où l'équation différentielle du mouvement
Ensemble correct sauf la fin. La norme de la force exercée par le ressort est :
T=k.(L+x)
En tenant compte de l'expression de L obtenue lors de l'étude de l'équilibre, tu devrais pouvoir simplifier l'équation différentielle.
D'accord.
Ainsi, dans (3) toujours :
m2(g - a) - m1a - T = m.a
m2g - k(l + x) = (m + m1 + m2).a
m2g - kl - kx = (m + m1 + m2).a
Or m2g - kl = 0 d'après la condition d'équilibre.
D'où
Équation horaire du mouvement
L'équation différentielle précédente caractérise les oscillateurs harmoniques. L'équation horaire est une fonction sinusoïdale du temps de la forme :
x = xm.cos( t +
t +  )
)
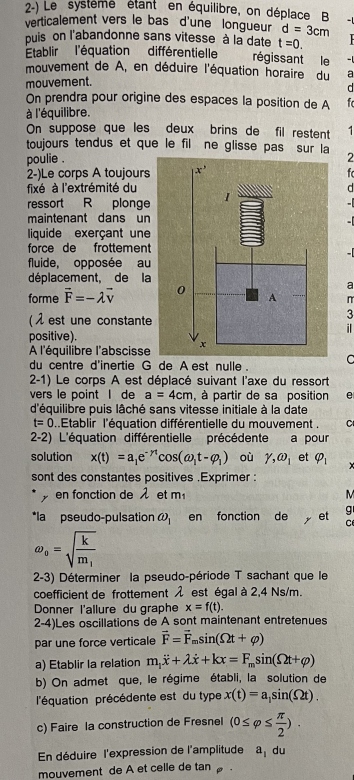
l'amplitude maximale est d = 3 cm , selon l'énoncé ;
la pulsation est :
AN : = 5 2 rad/s
2 rad/s
la phase à l'origine se détermine grâce aux conditions initiales :
À l'instant t, on a : x = xm.cos(t + )
Et v = - xm.sin(t + )
Maintenant à l'instant initial (t=0) : x = xm et v = 0
Donc cos = 1 et sin = 0
Donc = 0
D'où l'équation horaire du mouvement :
x = 3cos(52 t) (en cm)
D'accord avec tes résultats mais il serait préférable d'arrondir avec une précision compatible avec celles des données. Aucun appareil de mesure physique ne peut fournir un résultat multiple de
!
Merci.
Je précise que la numérotation des questions n'est pas correcte.
Une autre question N°2 :
2.1) Équation différentielle du mouvement :
Système : le corps A ;
Référentiel : terrestre (supposé galiléen) ;
Bilan des forces :
- le poids du corps A ;
- la tension du ressort ;
- la poussée d'Archimède ;
- la force de frottement fluide .
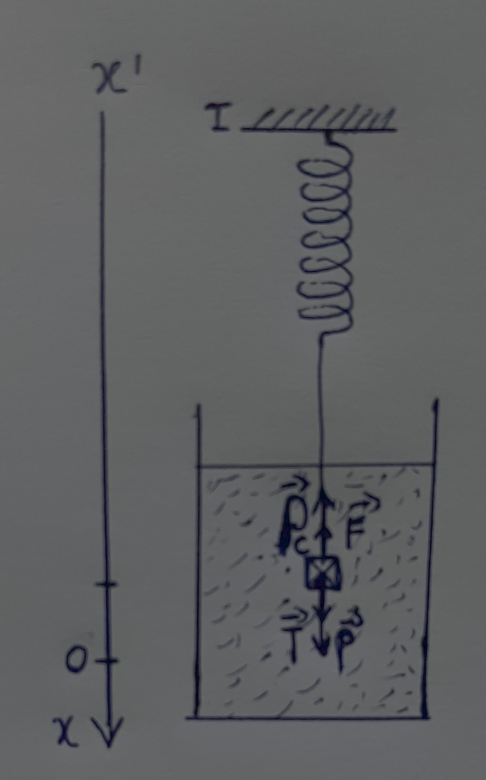
Maintenant, j'applique le TCI, je projette sur l'axe xx' vertical descendant pour trouver l'équation différentielle du mouvement à inconnue x. C'est ça ?
Même étude en deux temps que pour tous les oscillateurs :
1.Etude de l'équilibre permettant d'obtenir l'allongement à l'équilibre.
2. Etude dynamique en posant L-Lo=L+x
que représentent toutes ces grandeurs ?
Comme dans l'exercice précédent.
L représente l'allongement du ressort à l'équilibre.
Compte tenu du choix de l'origine des abscisses, l'allongement à un instant de date quelconque au cours des oscillations peut s'écrire :
(
L+x).
Comme dans l'exercice précédent, l'intérêt de ce choix conduit à une expression simplifiée de l'équation différentielle vérifiée par x.
D'accord
condition d'équilibre :
Sur l'axe Ox, on a :
mg + k.L -  Vg -
Vg -  V = 0
V = 0
Soit mg + k.L - (g + )V = 0 est la condition d'équilibre.
En oscillation :
Sur l'axe Ox :
mg + k(L + x) - (g + )V = m.x''
Je trouve m.x'' - kx = 0
Mais j'avoue que je ne suis pas convaincu de ce résultat, quand je lis la suite de l'exercice
Je crois qu'à l'équilibre, la poussée d'Archimède et l'intensité de la force de frottement fluide sont nulles, puisqu'il n'y a pas de vitesse. Le solide est en équilibre stationnaire (V = 0)
A l'équilibre, la force de frottement est nulle puisque la vitesse est nulle. La condition d'équilibre devient :
Soit :
k.L=m.g-Pc
Pourquoi ces signes "-" dans la relation vectorielle ???
Pour l'étude du mouvement, il te faut revoir les signes. Ensuite, la condition d'équilibre précédente conduit à des simplifications conduisant à l'équation différentielle :
D'accord, je reprends.
2.1) Équation différentielle du mouvement
À l'équilibre :
Sur l'axe Ox, on obtient : P - T - Pc = 0
Soit mg - k.L - Pc = 0
En oscillation :
Sur l'axe Ox, on obtient :
P - T - Pc - F = mx''
mg - K(L + x) - Pc - V = max''
mg - K.L - Kx - Pc - V = mx''
Or mg - k.L - Pc = 0
Soit m.x'' + .x' + kx = 0 est l'équation différentielle du mouvement.
C'est ça ?
Voici mes deux schémas 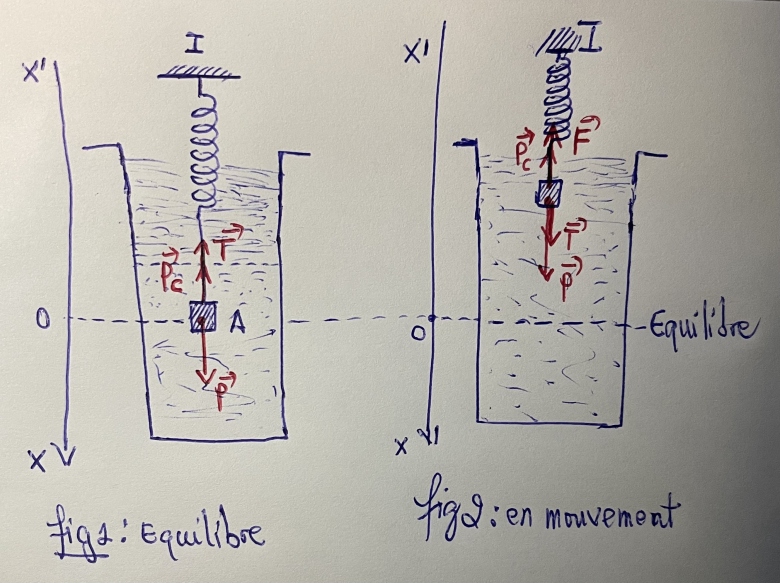
NB : j'ai commis une erreur sur la figure 2. La tension doit être orientée vers le haut et non vers le bas.
Schéma fait à main levée, pas tellement soigné mais passable.
D'accord avec ta démonstration de l'équation différentielle.
La tension doit être orientée vers le haut et non vers le bas.
Le ressort, dans les conditions les plus habituelles, travaille en extension : L>Lo et alors le vecteur
Cependant, l'énoncé parle d'un ressort à spires non jointives. Il peut donc aussi travailler en compression : L<Lo et
Lo à l'équilibre.D'accord.
Maintenant, puisque la tension est une force de rappel, est-ce qu'on pouvait dire plus simplement que :
si le solide est au dessus de la position d'équilibre, la tension est dirigée vers le bas ;
si le solide est en dessous de la position d'équilibre, la tension est dirigée vers le haut.
Relis bien mon précédent message : c'est la résultante des deux forces qui est équivalente à une force de rappel.
Sinon pour le sens de la tension :
Ressort plus long qu'à vide (ressort allongé) : tension orientée vers le haut ;
Ressort plus court qu'à vide (ressort comprimé): tension orientée vers le bas.
J'appelle ici tension la force exercée par le ressort sur le solide fixé à son extrémité inférieure.
D'accord, j'ai compris.
Question 2.2) : on demande d'exprimer  en fonction de et de m1 puis d'exprimer la pseudo-période 1 en fonction de et de 0 = (k/m1)
en fonction de et de m1 puis d'exprimer la pseudo-période 1 en fonction de et de 0 = (k/m1)
Comment procéder ?
J'ai tenté de dériver x deux fois de suite pour trouver la vitesse et l'accélération et ensuite remplacer dans l'équation différentielle précédente. Mais je trouve une expression très longue qui est difficile à réduire. De complication en complication, je me suis dit peut être que ce n'est pas la bonne méthode.
Tu peux commencer par diviser tous les termes de l'équation différentielle par m. Cela fait apparaître la pulsation propre et une constante a qui s'exprimera ensuite simplement en fonction de gamma. Ta méthode est la seule possible en terminale. N'oublie pas que l'équation différentielle doit être vérifiée quel que soit t donc quel que soit le sinus et le cosinus.
J'ai vraiment du mal à m'en sortir avec cette question. Quand j'essaye de remplacer x et ses dérivées primaire et secondaire dans l'équation différentielle, j'obtiens une relation très très longue et difficile à réduire. J'ai même du mal à l'écrire en latex ici.
S'il existe une autre méthode beaucoup plus simple, aidez-moi svp
Bonjour,
Il y a une méthode plus simple, mais elle passe par la connaissance des solutions de l'équation différentielle du 2ème ordre qui n'est pas enseignée au niveau terminale.
Moi, je procèderais ainsi:
* après avoir remplacé k/m1 par w0², calculer séparément x' et x"'
* constater que, dans x", x' et x, a1*exp(-t) se met en facteur, donc peut être supprimé puisqu'on cherche l'égalité à 0 de la somme et que ce terme n'est pas nul
* regrouper les termes en sinus et et cosinus
* annuler les coefficients correspondants pour trouver et w1
Bon courage tout de même.
Je crois que dans l'expression de l'équation différentielle, c'est la masse m1 du corps A qui doit intervenir et non la masse m de la poulie. Donc je rectifie.
m1.x'' + .x' + kx = 0
En simplifiant par m1 et tenant compte de l'énoncé, on trouve ceci :
x" + (/m1)x' + 0².x = 0
Sachant que les expressions trouvées sont trop longues, j'explique ici ma méthode et je dépose les réponses finales que j'ai trouvé.
j'ai dérivé l'équation horaire x deux fois de suite pour trouver x' et x" que j'ai remplacé dans l'équation différentielle ;
j'ai factorisé par a1e(-t). Ce facteur est différent de zéro ;
j'ai regroupé ensuite les termes en facteur de cos(1t-) et en sin(1t-) ;
j'ai annulé leurs coefficients respectifs pour trouver enfin :
et
À vérifier pour moi...
Bonjour,
Oui, c'est bien m1 mais j'avais rectifié.
OK a priori pour la démarche. Rectifie l'expression de puisque c'est m1. Par contre, pour 1 j'ai ² à la place de 3². Tu regardes cela ?
Ohhhhhh j'ai repris, je trouve exactement ce que t'as trouvé.
et
Question 2.3)
À partir de l'expression de 1 nous pouvons en déduire l'expression de la pseudo-période T.
AN : 0² = k/m1 = 40/0,4 = 100 (rad/s)²
= /(2m1) = 2,4/(2*0,4) = 3 N.s.m-1.kg-1
Alors T = 0,659 s
On demande l'allure de la courbe x =f(t)
L'équation horaire est de la forme :
a1 = a = 4 cm (selon l'énoncé) ;
= 3 N.s.m-1.kg-1
= 91 rad/s.
Je crois qu'il faut chercher la phase à l'origine 1 avant de faire le tracé de la courbe.
1 se détermine uniquement grâce aux conditions initiales.
On demande l'allure de la courbe x =f(t)
L'équation horaire est de la forme :
a1 = a = 4 cm (selon l'énoncé) ;
= 3 N.s.m-1.kg-1
= 91 rad/s.
Je crois qu'il faut chercher la phase à l'origine 1 avant de faire le tracé de la courbe.
1 se détermine uniquement grâce aux conditions initiales.
Attention, c'est a1cos(phi1) qui est égal à a.
Il faut utiliser en plus que la vitesse initiale est nulle.
D'accord j'ai compris.
A l'instant t quelconque :
A l'instant t = 0, x(0) = a et v(0) = 0
C'est ici que je suis bloqué
Pourquoi bloqué ?
x(0)=0 => a1*cos(ph11)=a
v(0)=0 => -a1*(gamma*cos(-ph1)+w1*sin(-phi1))=0
La deuxième équation entraîne tan(ph1)=gamma/w1 d'où tu tires phi1.
Et tu reportes dans la première pour avoir a1.
N.B.1 : Pour aller plus vite je n'utilise pas Latex que je ne maitrise pratiquement pas.
N.B.2: Pour ce soir, ce sera tout. Si un autre intervenant veut prendre le relais, qu'il n'hésite pas.
Bonjour,
Petite remarque préliminaire, comme tu donnes 3 chiffres pour a1, tu peux aussi donner 3 chiffres pour 1.
Sinon, pour la courbe, tu n'as pas de calculette ? Tu peux aussi utiliser un des logiciels gratuits de tracé. Moi j'utilise Geogebra, qui me donne le tracé ci-joint. Cela dit, peut-être que l'auteur souhaite une explication sur le tracé, à toi de voir.
Est-ce que ce logiciel fonctionne sur Android ou sur IOS ?
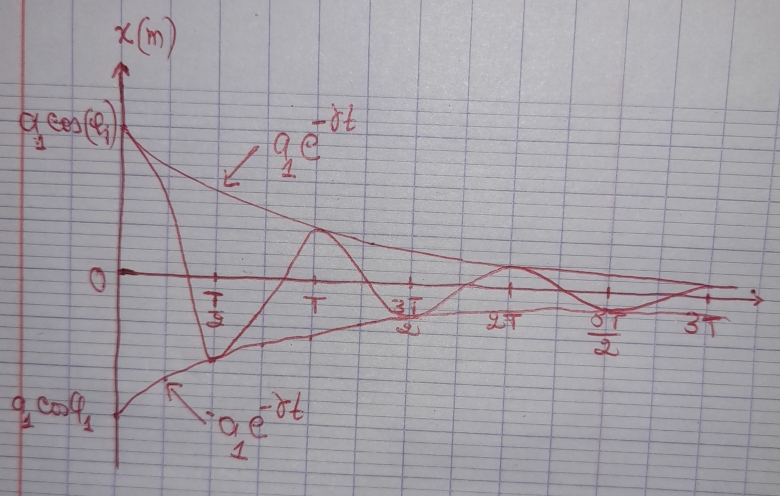
Par ailleurs, pour le tracé à main levée, il faut d'abord tracé les deux enveloppes d'exponentielle :
x(t) = + a1exp(-t)
x(t) = - a1exp(-t)
NB: ces deux courbes sont symétriques par rapport à l'axe des abscisses.
Ensuite tracé une fonction sinusoïdale entre ces deux enveloppes, en tenant des conditions initiales et de la période.
Graduer l'axe des abscisses en des périodes.
Pour IOS je ne sais pas, par contre il existe une version pour Android.
En ce qui concerne le tracé, tu suis la démarche que tu as postée. Tu justifie la décroissance rapide en comparant la période T et la constante de temps 1/3 de l'exponentielle. Tiens aussi compte du fait que la vitesse initiale est nulle, donc que la tangente à la courbe est horizontale à l'origine.
Tu as parlé d'une constante de temps de ⅓ de l'exponentielle. Qu'est-ce que ça veut dire physiquement ?