Inscription / Connexion Nouveau Sujet
vecteur accélération
Bonjour,
Tout d'abord, les flèches  signifieront qu'il y a un vecteur.
signifieront qu'il y a un vecteur.
Pour démontrer la formule de l'accéleration d'un mouvement ciruculaire ( a = (dv/dt)*T + ( v^2/r)*N)
, mon professeur est passé de (dT/dt) * v à ( v^2/r)*N. Pouvez-vous m'expliquer cette transition?
Il y a un autre soucis, à la suite du cours, pour les mouvements circulaires uniformes, il est dit que a = (dv/dt)*T + ( v^2/r)*N^2 .
Pourquoi le N devient N^2 ?
Bonsoir,
explication de la transition :
Vecteur vitesse dans le repère de Frenet : . Le vecteur vitesse est porté par la tangente à la trajectoire.
Le vecteur accélération s'obtient en dérivant le vecteur vitesse :
(Relation 1 )
Exprimons les vecteurs mobiles et
dans la base fixe
:
Calculons :
Retour à la relation 1:
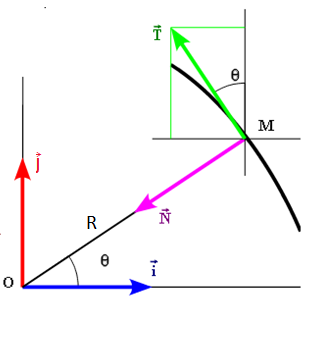
Comment trouve-t-on que vecteur T = -sin(theta) * vecteur i + cos(theta) * vecteur j , et de même avec le vecteur N?
De plus je pense ne pas comprendre les dérivées de vecteurs car je ne vois pas comment vous trouvez que la dérivée du vecteur T = -cos(theta)* dérivée ...
Merci de m'éclairer svp.
1) Comment trouve-t-on que vecteur T = -sin(theta) * vecteur i + cos(theta) * vecteur j , et de même avec le vecteur N?
Tout simplement en projetant les vecteurs et
sur la base
------------------------------------------------------------------
2) je pense ne pas comprendre les dérivées de vecteurs car je ne vois pas comment vous trouvez que la dérivée du vecteur T = -cos(theta)* dérivée ...
Je ne peux pas faire dans le cadre de ce forum un cours de mathématiques sur la dérivée des vecteurs.
On a ici :
Le vecteur n'est pas un vecteur fixe, sa direction change en permanence.
La dérivée par rapport au temps de ce vecteur ( voir un cours de maths sur cette question ) est :

