Inscription / Connexion Nouveau Sujet
la physique en robotique
Bonjour,
j'ai actuellement un robot et j'ai envi de greffer à ce dernier un accéléromètre qui permettra de mesurer l'angle de ce dernier par rapport à l'horizontale.
Il s'agit d'un accéléromètre qui mesure l'accélération du mobile (ici le robot) sur deux axes perpendiculaires.
Je compte d'abord me servir d'un axe seulement puis par la suite passer à la mesure d'un angle grâce à deux axes.
J'ai fait une ébauche de raisonnement dont j'aimerai avoir confirmation :
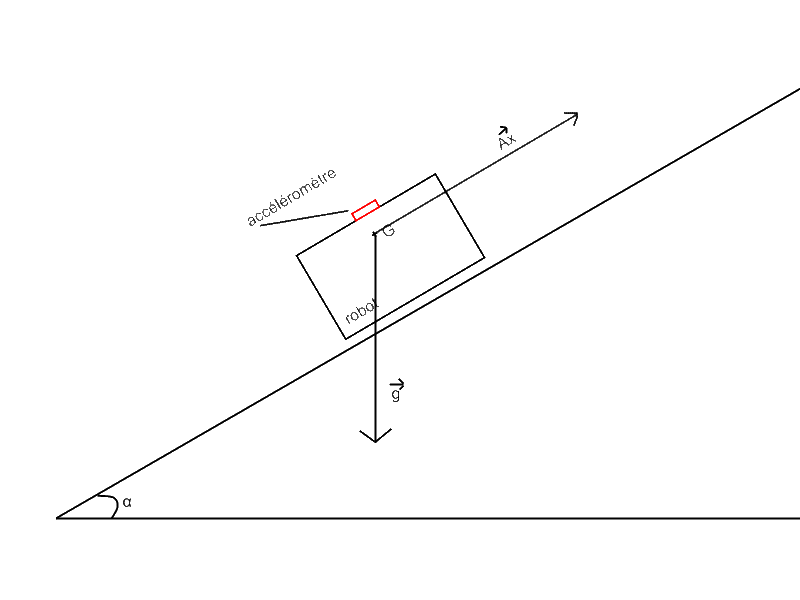
système : robot
référentiel : terrestre galiléen
le robot est soumis à son accélération et le champ de gravité, si on prend les mêmes notations que sur le schéma joint on a alors :
Ax = g * sin ( α )
on a donc α = arcsin(Ax/g)
J'aimerai avoir la confirmation de ceci avant d'aller plus loin
merci d'avance.
je crois que ton raisonnement est bon si on considère que le robot est soumis à laction F d'une force constante qui lui confère une accélération Ax et à son poids qui lui confère une accélération -g*sin(alpha)
Si la pente est constante et la vitesse du moteur aussi, j'ai bien peur que les accélérations mesurées soient nulles quelles que soient les directions des mesures.
Si la vitesse est variable et la pente constante, alors il devrait être possible de déduire la pente par les 2 mesures d'accélération.
Si la vitesse et la pente varient en même temps, alors c'est impossible aussi.
Bref, la mesure de pente via des accéléromètres n'est pas vraiment adéquate.
Sauf distraction. 
je crois que ton raisonnement est bon si d'une part on considère que le robot est soumis à l'action F d'une force constante qui lui confère une accélération Ax et à son poids qui lui confère une accélération -g*sin(alpha), d'autre part que la vitesse du solide est constante.
Dans le cas où le solide serait soumis à une accélération ( c'est à dire que la vitesse du solide n'est pas constante) la relation suivante te permet de connaitre la variation de alpha
sin(alpha)=(Ax - F/m )/g

