Inscription / Connexion Nouveau Sujet
Pendule simple
Bonjour, aidez-moi svp
Problème
Un pendule est constitué d'un fil inextensible, de masse négligeable et d'une bille assimilable à un point matériel de masse m = 5 g. Le pendule est suspendu au plafond d'un véhicule animé d'un mouvement rectiligne d'abord horizontal puis ascendant.
1) Dans la partie horizontale, le véhicule est soumis à une accélération constante a = 5 m/s². Déterminer l'inclinaison du pendule par rapport à la verticale ainsi que le module de la tension du fil. On donne : g = 10 m/s².
2) Dès qu'il aborde la côte inclinée d'un angle β = 20° par rapport à l'horizontale, le véhicule n'est plus soumis à l'action du moteur et il continue sur sa lancée sans frottements le long de la côte.
a) Calculer l'accélération du véhicule et la distance parcourue avant l'arrêt, sachant que sa vitesse au bas de la pente est égale à 20 m/s.
b) Déterminer l'inclinaison du pendule par rapport à la verticale (on l'exprimera en fonction de l'angle β du plan incliné).
Bonjour
Applique la relation fondamentale de la dynamique à la masse du pendule dans un repère lié à la terre et considéré comme galiléen. La direction de la tension du fil donnera la réponse. L'accélération la la masse est celle du véhicule par rapport à la terre
D'accord !
Je suis bloqué au niveau de la question 2.b) où je peine à trouver une relation entre l'inclinaison du pendule et l'inclinaison du plan incliné par rapport à l'horizontale.
Pour la question 2b), la méthode est la même qu'à la première question. Il faut commencer par faire une figure soignée, en exagérant au besoin l'angle  recherché. Ne pas se tromper sur le sens du vecteur accélération par rapport à la terre.
recherché. Ne pas se tromper sur le sens du vecteur accélération par rapport à la terre.
Si tu as un doute sur ton schéma, tu peux le scanner et le poster ici.
Question 1)
- système : pendule de masse m ;
- référentiel : terrestre (supposé galiléen) ;
- bilan des forces : et
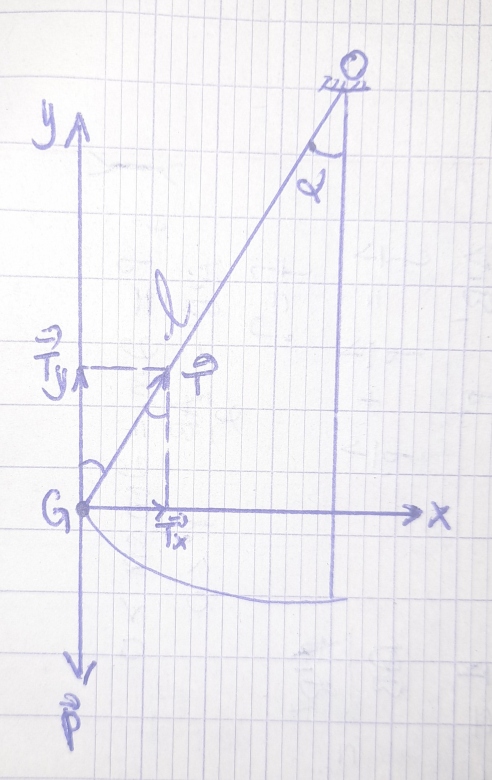
Application du Théorème du centre d'inertie :
En projetant sur les axes (Gx) et (Gy) on obtient respectivement deux relations qui sont :
(1)
(2)
En faisant (1)/(2), on obtient ceci :
AN :  26,6⁰
26,6⁰
2.a) Accélération du véhicule
- système : véhicule de masse M ;
- référentiel : terrestre (supposé galiléen) ;
- bilan des forces : et
Le TCI permet d'aboutir à cette relation classique :
AN : a = - 3,42 m/s²
Distance totale parcourue jusqu'à l'arrêt
AN : d 58,5 m
2.b) Inclinaison du pendule en fonction de 
C'est là je suis bloqué. Je ne sais pas si ma figure est bonne.
Une fois le moteur coupé, le véhicule est animé par rapport à la route d'un mouvement rectiligne uniformément retardé. Son vecteur accélération est orienté vers le bas et ce vecteur est aussi le vecteur accélération du pendule par rapport à la terre puisque le pendule est immobile par rapport au véhicule. Ton orientation de pendule ne permet pas de vérifier la relation fondamentale de la dynamique.
Non ; Je veux simplement dire que, par rapport à la verticale locale du véhicule, G est à droite et non à gauche sur ton schéma. Puisque le vecteur accélération est orienté vers le bas de la pente tant que le véhicule monte, impossible avec ton schéma d'obtenir :
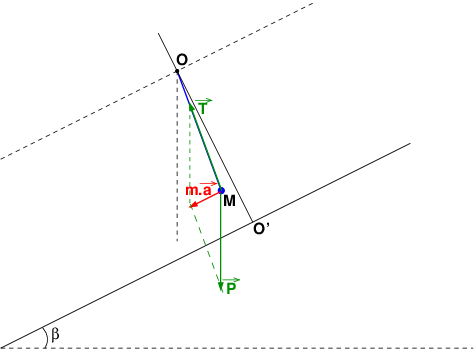
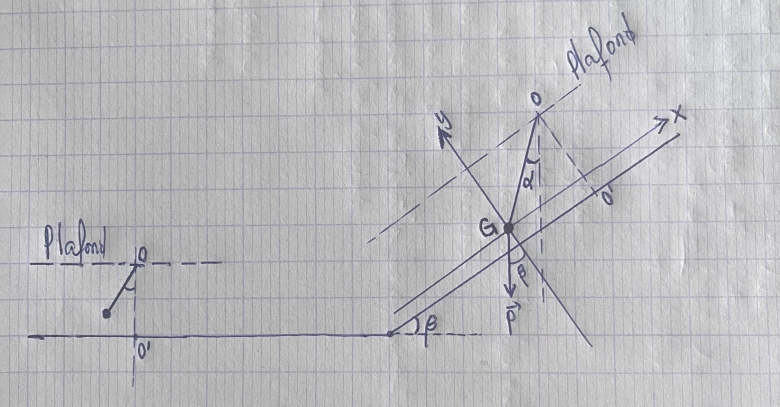
Le schéma pourrait ressembler à cela. Je te laisse compléter, au niveau des angles en particulier, puis projeter la relation vectorielle. Dans la mesure où a=g.sin(), tu vas trouver une relation simple entre et .
Rem : tu as parfois confondu et dans tes messages précédents.
vanoise, le véhicule étant animé d'un mouvement uniformément retardé, on devrait trouver a = - g.sin < 0 et non a = g.sin > 0, je pense !
Tout dépend de l'orientation de ton axe ! Si tu gardes l'orientation des questions précédentes : axe O'x colinéaire à la ligne de plus grand pente et orienté dans le sens montant, tu as effectivement :
ax=-g.sin().
Pour moi , dans mon précédent message : a désignait la norme du vecteur accélération.
Ce que le professeur nous a enseigné, c'est d'orienter l'axe (Ox) suivant le sens du mouvement. Cela permet de trouver a = - g.sin pour la montée et a = g.sin pour la descente.
Je suis vraiment surpris que le pendule soit à droite de la verticale locale du véhicule.
Si le véhicule était immobile sur le plan incliné, le fil du pendule allait être sur la verticale. Maintenant que le véhicule monte la pente, j'avais cru que le pendule allait se pencher à gauche de la verticale.
Ce n'est pas le sens du mouvement qui importe, c'est le sens du vecteur accélération. Mon schéma est clair à cet égard,me semble t-il.
La projection sur l'axe Ox de la relation vectorielle conduit à :
Tx+Px=m.ax
Détermine Tx et tu pourras conclure. Le résultat est très simple !
Oui. Si tu projettes sur l'axe (Ox) comme déjà indiqué,tu obtiens :
ax=-m.g.sin()
Px=-m.g.sin()
Donc :
Tx=0.
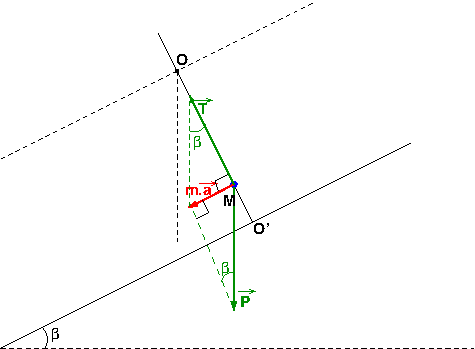
Le vecteur est donc perpendiculaire à l'axe (Ox). Sur mon schéma,le point M appartient au segment OO',ce qui conduit à :
= .
Ceci est bien sûr une situation peu réaliste car elle correspond à l'absence de force de frottement exercée sur le véhicule.
En plus, je ne comprend pas bien quand tu dis que est perpendiculaire à l'axe (Ox).
Quand j'observe bien ta figure, je trouve que tel n'est pas le cas. L'axe (Ox) est parallèle à la ligne de plus grande pende pente et est perpendiculaire à (OO') ; mais n'est pas colinéaire à (OO'), du coup il ne peut pas être perpendiculaire à l'axe (Ox).
Il m'arrive parfois d'être étourdi et/ou de mal lire l'énoncé. Mais ici, il est clairement écrit que l'accélération du véhicule par rapport à la terre se calcule en négligeant les frottements.
Tu as donc bien : m.ax=-m.g.sin() (j'ai oublié le "m" dans mon précédent message)
De plus : Px= -m.g.sin()
Puisque : m.ax=Px+Tx, cela conduit bien à Tx=0 donc à un vecteur orthogonal à l'axe (Ox), donc à
=.
Il y a donc une erreur sur ton document : ce sont des choses qui arrivent parfois. Je me suis demandé si le correcteur n'a pas par erreur utilisée la formule valide pour un vecteur accélération horizontal : mais cela ne conduit pas non plus à 4
/5. En plus : trouver un rapport / égal à un nombre rationnel : très bizarre.
Quand j'observe bien ta figure, je trouve que tel n'est pas le cas
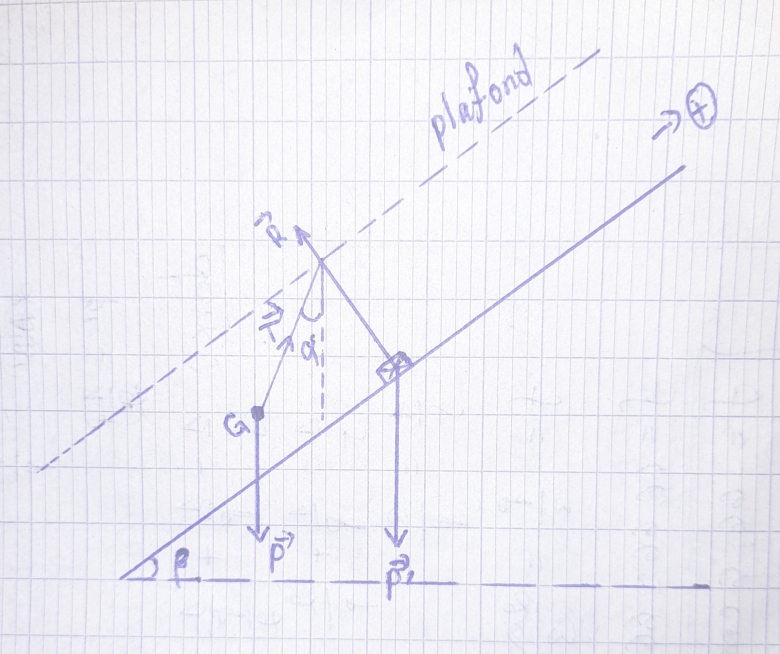
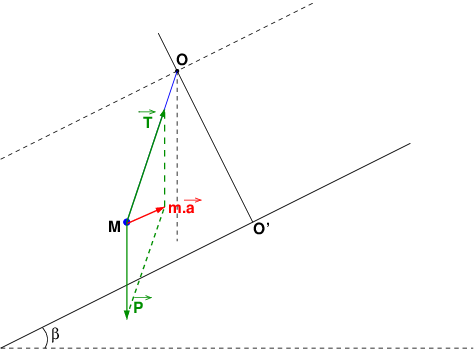
J'ai fait précédemment un schéma avec une accélération de valeur quelconque, histoire de ne pas te fournir directement la réponse. Voici le schéma en absence de frottement.
Donc, la bonne réponse est bien = ?
Vous confirmez cela ?
Je résolu un exercice pareil avec krinn, que je salue de passage. Mais là-bas, il s'agissait d'un virage relevé. Le pendule était suspendu au plafond d'un véhicule qui doit virer à vitesse constante sur un plan incliné. Les frottements négligeables. Pour que le véhicule vire sans risque de dérapage, l'inclinaison du pendule doit être égale à l'inclinaison du plan incliné. Du coup, la réaction du plan sur le véhicule joue le même rôle que la tension du fil du pendule, c'est pourquoi les deux angles restent égaux, bien entendu en l'absence des frottements.
Oui : on a bien ici, en absence de frottement : =.
Il y a une analogie avec le relèvement d'un virage. Attention tout de même à ne pas confondre deux situations distinctes :
1° : celles où le vecteur accélération est horizontal donc perpendiculaire au vecteur poids ( question 1 de ce problème et relèvement d'un virage) :
2° : celles où le vecteur accélération est colinéaire à la ligne de plus grande pente du plan incliné. Les projections des vecteurs sont différentes.
Bonjour vanoise,
Je reviens vers vous avec toujours cet exercice et notamment sur la question 2.b)
J'ai relu le corrigé plusieurs fois, je ne comprends toujours pas pourquoi le fil du pendule se trouve sur la normale au plan incliné.
Maintenant, je pose ces questions :
Quelle serait la position d'équilibre du pendule :
a) si le véhicule était immobile sur le plan incliné ?
b) si le véhicule était animé d'un mouvement accéléré vers le haut ?
c) si le véhicule était animé d'un mouvement uniforme le long du plan incliné ?
d) si le véhicule était animé d'un mouvement retardé le long du plan incliné ?
Ici, le véhicule aborde la pente au moment où le fil n'est pas sur la verticale.
C'est le schéma que je pense physique réaliste.
Impossible pour moi de comprendre comment le pendule peut être sur OO' le long du plan incliné, franchement.
Stp, aidez moi, ne vous fâchez pas ! Svp !
je ne comprends toujours pas pourquoi le fil du pendule se trouve sur la normale au plan incliné.
Tes figures et l'application de la RFD à la boule du pendule conduisent à :
). Cela conduit bien à : = donc au schéma du 03-12-24 à 14:02.
Ne pas confondre avec d'autres problèmes concernant l'équilibre d'un pendule avec une accélération horizontale. Il faut alors remplacer le sinus par une tangente dans la formule précédente.
A noter aussi qu'une accélération par rapport à la route orientée vers le bas correspond à deux mouvement possibles du véhicule :
1° : un mouvement retardé vers le haut, ce qui est le cas ici ;
2° : un mouvement accéléré vers le bas, toujours en absence de frottement et de force motrice.
a) si le véhicule était immobile sur le plan incliné ?
Le pendule indiquerait simplement la verticale du lieu. Cela correspond à une accélération nulle.
c) si le véhicule était animé d'un mouvement uniforme le long du plan incliné ?
L'accélération serait nulle. Même position verticale du pendule que dans le cas précédent. Je parle bien de la verticale, pas de la perpendiculaire à la route.
d) si le véhicule était animé d'un mouvement retardé le long du plan incliné ?
N'oublie pas : pour un mouvement rectiligne :
mouvement accéléré si vecteurs vitesse et accélération de même sens ; mouvement retardé si vecteurs vitesse et accélération de sens opposés !
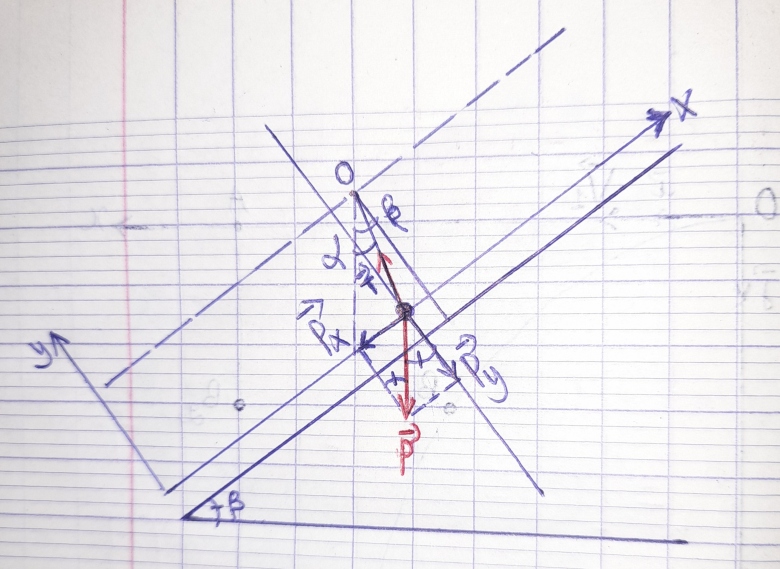
Je viens de voir ton schéma du 19-05-25 à 15:27 :
Sachant que la tension du fil est orienté de G vers O, pose-toi les questions suivantes :
sur cette figure, dans quel sens est orienté le vecteur accélération ? A quels types de mouvement cela peut-il correspondre ?
Je viens de voir ton schéma du 19-05-25 à 15:27 :
Sachant que la tension du fil est orienté de G vers O, pose-toi les questions suivantes :
sur cette figure, dans quel sens est orienté le vecteur accélération ? A quels types de mouvement cela peut-il correspondre ?
Puisque le véhicule monte la pente, le vecteur vitesse est orienté vers le haut.
Maintenant l'orientation du vecteur accélération dépend de la nature du mouvement. Ici, le mouvement étant retardé, le vecteur accélération est orienté vers le bas.
Tu n'as pas répondu à la question que je t'ai posée. Il faut raisonner sur l'accélération. Puis, connaissant l'accélération, on constate qu'une même accélération correspond à deux mouvements possibles.
Sur ta figure, G est à gauche de la verticale passant par O. Le vecteur , égal au vecteur
est nécessairement orienté dans le sens de la montée.
Cela correspond soit à un mouvement accéléré vers le haut grâce à l'action d'une force motrice exercée sur le véhicule, soit à un mouvement retardé vers le bas de la pente grâce à l'action d'une force de freinage.
Maintenant si je comprends bien, quand le mouvement est RETARDÉ, la boule du pendule doit être du côté droit de la verticale passant par O. Mais quand le mouvement est accéléré, G doit être du côté gauche de la verticale passant par O. C'est ça ?
Ensuite, être du côté droit de la verticale passant par O ne veut pas dire forcément que le fil du pendule est perpendiculaire à la route. C'est là mon gros souci !
vanoise,
Si tu me permets bien, je vais poster ici la résolution de la question 2.b) sur laquelle je planche. Cette résolution est faite par le concepteur de l'exercice. J'ai fait la capture d'écran de sa résolution.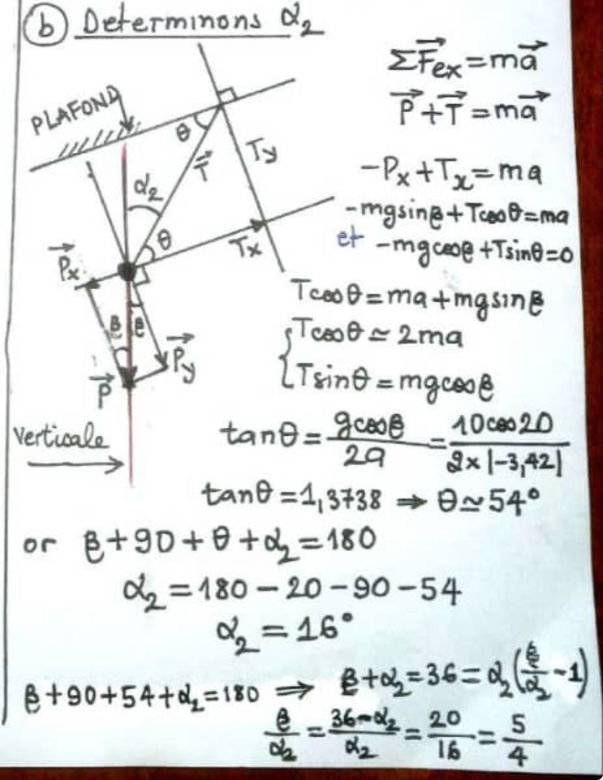
Je pense que gbm sera tolérant aussi.
quand le mouvement est RETARDÉ, la boule du pendule doit être du côté droit de la verticale passant par O
Non !
* La boule est à droite de la verticale passant par O si l'accélération est orienté vers le bas de la pente ;
* La boule est à gauche de la verticale passant par O si l'accélération est orienté vers le haut de la pente :
* le pendule indique la verticale passant par O si l'accélération est nulle.
Ensuite, suivant la vitesse, deux cas sont envisageables selon la vitesse pour chacune des trois situations.
Je me répète : c'est le vecteur accélération du véhicule par rapport à la terre qui fixe la position d'équilibre du pendule, pas la nature retardé ou accéléré du mouvement du véhicule.
Pour l'étude de ton message du 19-05-25 à 17:15.
Tu devrais représenter sur ton schéma, avec une couleur différente, le vecteur accélération ou le vecteur
Dans ta projection sur l'axe des x, tu écris :
T.cos(
 )=ma+m.g.sin()=2m.a
)=ma+m.g.sin()=2m.a
Cela serait correct pour un vecteur accélération orienté dans le sens positif donc, par exemple, pour un véhicule montant la pente en accélérant grâce à l'action du moteur.
Or, la question2) conduit, comme cela a été largement justifié précédemment, en absence de frottement et en absence d'action du moteur, à un vecteur accélération orienté vers le bas. Ta relation précédente conduit à :
T.cos(
)=-m.g.sin()+m.g.sin()=0
Donc, puisque T
 0, cos()=90° : le pendule est suivant Oy ou OO' (voir schéma du 03-12-24 à 14:02).
0, cos()=90° : le pendule est suivant Oy ou OO' (voir schéma du 03-12-24 à 14:02).
Tout cela à cause d'un problème de notation. Dans les situations un peu complexe comme ici, tu pourrais réserver la lettre "a" pour désigner la norme du vecteur et noter ax et ay les projections du vecteur sur les axes.
J'ai très très très bien compris le phénomène !
J'avoue que cet exercice suscite actuellement un débat très houleux entre plusieurs profs de Physique.
La seule chose qui me reste à comprendre, c'est comment établir la relation
Le "concepteur de cet énoncé" aurait sans doute évité son erreur s'il avait pris soin sur son schéma de représenter, éventuellement avec une couleur différente, le vecteur ou le vecteur
...
Je suis d'accord avec toi, franchement ! J'ai très bien compris maintenant !
Moi je raisonnais sur la nature du mouvement. Mais le bon sens consiste à faire un raisonnement sur le sens du vecteur accélération.
Ici le est forcément colinéaire au vecteur vitesse mais de sens contraire. Puis le véhicule monte, son vecteur vitesse qui suit toujours le sens du mouvement est donc orienté vers le haut. Alors le vecteur accélération est orienté vers le bas.
Faute de frappe dans mon message du 19-05-25 à 18:33 trois ligne avant la fin. Tu as sûrement rectifié de toi-même, mais je préfère quand même corriger :
T.cos()=-m.g.sin()+m.g.sin()=0
Donc, puisque T0, =90°
Je suis d'accord avec toi, franchement ! J'ai très bien compris maintenant !
Moi je raisonnais sur la nature du mouvement. Mais le bon sens consiste à faire un raisonnement sur le sens du vecteur accélération.
Ici le vecteur est forcément colinéaire au vecteur vitesse mais de sens contraire. Puis que le véhicule monte, son vecteur vitesse qui suit toujours le sens du mouvement est donc orienté vers le haut. Alors le vecteur accélération est orienté vers le bas, car le mouvement est retardé.
Or n'est rien d'autre que la resultante de
et
.
Il est donc logique que le pendule soit à droite de la verticale passant par O.

