Inscription / Connexion Nouveau Sujet
Ah donc c'etait pas bon ce que j'avais mis alors ?
Oui pour calculer la norme du vecteur on fais prendre toute les composant au carré on fais la somme puis on fais la racine carré de cette somme
C'était quasiment correct. Il manquait le derrière dx/dt. Fais attention, c'est faux de mélanger des vecteurs et des scalaires et tu as déjà fait cette faute quelques fois.
Sinon pour ce que tu m'as dis concernant la norme d'un vecteur je suis d'accord. Peux tu alors donner l'expression de la vitesse du point M dans le repère principal ?
Ben si, on a répondu à la question, d'où le fait que j'ai encadré le résultat.
OM est un vecteur, même si on dérive son expression par rapport à un temps on obtiendra toujours encore un vecteur ! C'est donc bien normal que les vecteurs ne "partent" pas.
Ok je voie totalement ! j'apprend beacoup beacoup de chose je suis tres content 
Mais cette exercice n'est pas evident je trouve
Je te conseille d'encore une fois relire cette partie de ton cours une fois l'exercice terminé.
Je te repose ma question : peux-tu me donner l'expression de la vitesse du point dans le repère principal ?
Oui je le fais en parralèle qu'on fais l'exercice et je comprend tout pour le moment mais après cette exo il y a l'acceleratione , base cartésienne cylindrique etc..
L'expression de la vitesse , donc je te donne la norme c'est sa ?
Je suis d'accord avec toi. Développe maintenant le terme en et simplifie ce que tu as obtenu (souviens toi que cos²(x) + sin²(x) = 1)
Tu devrais obtenir une somme de quelque chose qui dépend de théta et quelque chose qui n'en dépend pas sous la racine.
Je viens de le developper sur mon cahier de brouiller avec les identité remarquables , mais c'est pas evident de se retrouvé une fois developper pour le simplifier .. 
Non, je n'ai pas cette vitesse étant donné que c'est le but de la deuxième question, déterminer cette vitesse pour que le bout de la pale ne dépasse pas le mur du son (il y aurait sinon une perte quasi immédiate de portance sur cette pale et l'hélicoptère ne volerait plus très longtemps du tout...).
Et développe juste ce qui est sous la racine, fais le méthodiquement puis inscris le résultat que tu trouves ici. On pourra alors s'intéresser à la valeur de pour laquelle la vitesse en M (à une vitesse d'avancement selon
donnée) est maximale.
Florian
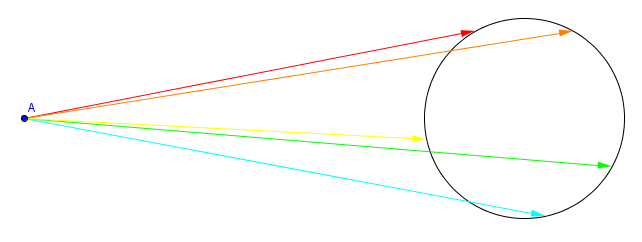
PS : Je te joins ci-dessous une image pour te montrer que la vitesse absolue du point M varie en fonction de l'angle et qu'il est donc important de déterminer l'angle
pour lequel cette vitesse absolue est maximum.
Bonjour Florian ,
J'ai essayé de la developpé donc j'ai fais les identitées remarquable comme je t'ai dis mais après je suis bloqué ..
Et puis j'ai pas compris le systeme avec la pale , le son , et les pertes :/
Pour la pâle etc, ce n'est pas un problème. Dans l'exercice on te donne tout ce qu'il faut au final pour résoudre la question en t'indiquant que l'on doit toujours avoir :
C'est tout ce dont tu as besoin de savoir.
Et pour l'instant, le développement de ce qui est sous la racine devrait te donner ceci non :
Non ?
Il n'y a pas ensuite de grande simplification à faire, regroupe simplement les termes en et
en te souvenant que
.
Oui, je sais, c'est juste pour faire disparaître la racine. Mais tu peux juste t'intéresser à cela si tu veux (qui est censé être ce que tu as obtenu après avoir utilisé les identités remarquables) :
Oui, exactement. Tu auras alors quelque chose qui ne dépend plus de et tu auras donc au final sous ta racine deux termes qui ne dépendent pas de
et un qui en dépend.
Écris l'expression finale de la vitesse que tu obtiens dans ton prochain message.
On est entièrement d'accord sur l'expression de la vitesse du point M. Vois-tu maintenant pour quelle valeur de cette vitesse est maximum ?
Souviens toi du fait que la fonction "racine carrée" est croissante ce qui veut dire que la propriété suivante est vraie :

Désolé si je n'étais pas complètement clair. En faite je te demandais de commencer par maximiser l'expression qui était sous la racine. En d'autres termes, trouver tel que, pour tout
on ait :
Peux-tu alors trouver cette valeur ?
Pour l'instant la vitesse du point dépend à la fois de la position de la pale (via l'angle
) et la vitesse d'avancement de l'hélicoptère.
Tu es d'accord avec moi que l'on peut régler la vitesse d'avancement de l'hélicoptère (en disant au pilote de ne pas dépasser les 200, 250 ou encore 300 km/h) mais il est impossible de fixer l'angle qui nous "arrangerait" le plus car les pâles de l'hélicoptère tourne en permanence.
On va donc chercher à se mettre dans le cas le plus défavorable, c'est à dire celui pour le quel, à une vitesse d'avancement quelconque de l'hélicoptère, la vitesse du point M est maximum. Etant donné que la vitesse d'avancement est fixé (et que l'on connait et
également) le seul paramètre qui peut encore faire varier la vitesse du point M est la valeur de l'angle
.
Par exemple, si alors on aurait :
Si on aurait :
Et ainsi de suite. Je te demande donc pour l'instant de me dire pour quelle valeur de , la vitesse
est maximum. Comprends-tu maintenant pourquoi ?
... , j'ai compris le debut , mais le rete j'ai pas compris et je vois pas pourqquoi tu parles encors de theta alors qu'il n'y est plus dans la formule ?
Ben si, dans ta formule il y a encore le sinus qui dépend de :
Si tu préfères, trouves tel que cette fonction soit la plus grande possible :
Où et
sont tous les deux strictement positifs.
Florian
Oui, on est d'accord, (avec a et b positifs) est maximum quand
.
Dans le cas de notre hélicoptère la vitesse maximale du point (à une vitesse d'avance donnée) est donc lorsque l'angle
vaut
La vitesse maximale de la pale (encore une fois, à une vitesse d'avance donnée) est donc :
Et maintenant on cherche à trouver la valeur de maximum telle que :
Ou encore, si on pose on cherche à trouver la plus grande valeur possible de
telle que :
Au final tu vas donc avoir à résoudre une équation du second degré, je pense que tu sais faire.
Florian
Non, pas du tout. Je ne comprends pas comment tu obtiens cela. On part de cela :
On élève les deux membres au carré :
Le déterminant du polynôme du second degré à gauche vaut :
On voit rapidement que la fonction est décroissante sur l'intervalle puis croissante sur l'intervalle
.
Chercher à trouver la plus grande valeur de vérifiant l'inégalité de départ revient donc à résoudre :
A toi de résoudre ensuite...
C'était pour vérifier que la fonction était bien croissante sur (l'intervalle dans lequel varie
, car je rappelle que
représente la vitesse à laquelle l'hélicoptère avance).
Ainsi trouver la plus grande valeur de telle que
soit vérifiée revient à résoudre :
Je te l'ai déjà dit la dernière fois, commence par des expressions littérales et ne mélange pas numérique et littéral.
En outre tu peux remarquer ceci :
Et là je te laisse finir (identité remarquable puis un produit de deux facteurs nul...) pour obtenir l'expression littérale de .
Je suis d'accord avec le résultat. Mais pour être totalement rigoureux j'aurais préféré que tu écrives :
(car X est positif)
Toujours est-il qu'on a bien en effet :
Tu peux maintenant faire l'application numérique. N'oublie pas que le tr/min n'est pas compatible avec le système international et qu'il faut d'abord le convertir en rad/s (1 tour = 2pi radian et bon, 1 minute = 60 secondes).
Florian
Ah je savais pas sa que le tour par minute n'était pas compatible , comment j'aurais pu le savoir si tu m'aurais pas dis ?
J'aurais jamais pensé ..
sinon
450tours/min = 47.12 rad/s
Composante de la vitesse de M suivant Ox : Vx = VH + d(R.cos(wt))/dt (avec VH la vitesse de l'hélico)
Composante de la vitesse de M suivant Oy : Vy = d(R.sin(wt))/dt
Composante de la vitesse de M suivant Oz : 0
Vx = VH - w.R.sin(wt)
Vy = w.R.cos(wt)
vz = 0
V² = Vx² + Vy² + vz²
V² = (VH - w.R.sin(wt))² + (w.R.cos(wt))²
V² = VH² + w²R² - 2w.R.VH.sin(wt))
V² (et donc aussi V) est max aux instants tels que sin(wt) = -1. (Ca c'est évident même sans calculs, non ?)
On a donc (V²)max = VH² + w²R² + 2w.R.VH
Et on veut que VH² + w²R² + 2w.R.VH <= 330²
VH² + (450 * 2*Pi/60)² * 5,3² + 2 * (450 * 2*Pi/60) * 5,3 * VH - 330² <= 0
VH² + 499,5 VH - 46521 <= 0 (avec VH > 0)
VH <= 80,2 m/s
-----

Bonjour J-P
Merci pour t'as reponse , j'ai effectivement compris le debut mais ensuite j'ai pas compris vers la fin ta manière de faire le calcul
Bonjour J-P.
Pour lolo77150, je suis d'accord, on a donc au final :
Et l'application numérique nous donne la vitesse d'avancement maximum de l'hélicoptère :
Florian
Enfin fini ! Je te remercie Florian , grâce à ton aide j'ai appris plein de truc qui était pas clair dans ma tête à la base ! Maintenant je vais relire encors le cours sur la vitesse histoire de bien bien maitrisé et ensuite je passe à l'acceleration j'espère que tu es aussi fort en acceleration qu'en vitesse car il y a un exercice de même genre
Merci à toi JP également

