Inscription / Connexion Nouveau Sujet
Mecanique
Bonjour l'ile ! 
Alors j'ai un problème de résolution pour cette exercice :
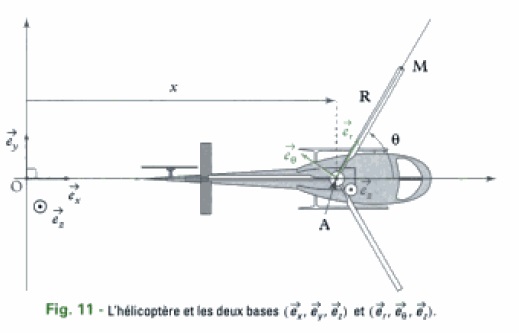
Exprimer le vecteur vitesse du point M dans le référentiel R ( O ; \vec{Ex} ; \vec{Ey} ; \vec{Ez} ) , dans le cas d'un helicoptère comme vu précédemment
Determiner la vitesse limite d'avancement de l'hélicoptère selon l'axe ( O ; \vec{Ev} ) sachant que la vitesse du point M doit être inférieur à la vitesse du son ( ) à chaque instant .
Données : Les pales ont un rayon R = 5.3 m et tournent avec une vitesse angulaire :
\omega = \frac{d\teta}{dt} =
Bonjour Florian !!
Je viens de lire tout mon cours sur la vitesses et j'ai tout compris , tu parles comment on a la vitesse tout sa ?
En tout cas je viens de lire tout mon cours et sa c'est le 1er exercice d'application
Oui, "comment on a la vitesse tout sa" 
Tu devrais avoir une loi appelée la loi de composition des vitesses qui fait intervenir les notions de vitesse d'entrainement, vitesse relative et vitesse absolue. Cela te dit quelque chose ? Si c'est le cas, utilise cette relation pour répondre à la question 1).
Florian
Ah non j'ai pas eu sa dans mon cours
J'ai vu que la vitesse c'etais la derivée de la position en plus détaillé c'est tout donc la partie "Vecteur vitesse" et en suite j'ai eu ce petit exo d'application pour les notions que j'avais vu precedement donc vecteur vitesse , vitesse d'un point , vecteur position & trajectoire
D'accord.
Dans ce cas là peux-tu écrire les coordonnées du vecteur dans la base
?
Puis applique la formule donnant la vitesse en fonction du vecteur position .
Florian
Je ne suis pas du tout d'accord avec toi. Décompose le vecteur OM :
OM = OA + AM
Ecrit maintenant les vecteurs OA et AM dans la base (O, ex, ey, ez)
OK pour le vecteur OA. Je ne comprends pas ta question pour le vecteur AM, peux-tu m'expliquer ce que tu entends par faire le produit scalaire ?
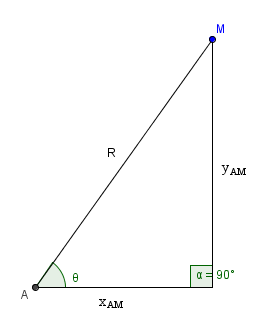
Il faut utiliser la trigonométrie. Regarde le schéma d'un peu plus près (image jointe) et déduis-en les coordonnées du vecteur AM dans le repère (O, ex, ey, ez). Tu connais et
tu peux donc exprimer
et
. Et attention, comme je te l'avais dis dans un précédent échange, garde bien les valeurs littérales de
et
!
Florian
Voilà ! Cette "méthode" te sera très souvent utile, penses-y à chaque fois qu'un angle et une projection sur des axes apparaissent.
Écris désormais les coordonnées du vecteur dans la base
.
Oui effectivement ! j'avais jamais pensé a faire ceci ! 
Oulala par contre je suis pas du tout sur de comment j'ai ecrit
Oui, est très mal écrit, c'est même complètement faux (enfin, je comprends ce que tu voulais écrire, et c'est juste, mais la façon dont tu l'as écris est complètement fausse) : on ne mélange pas des vecteurs et des scalaires.
Sur quel axe as-tu projeté AM pour obtenir R.cos(theta) et sur quel axe as-tu projeté AM pour obtenir R.sin(theta) ? (Penses éventuellement à la direction qu'aurait AM si theta valait 0 ou Pi/2 si cela peut t'aider)
Florian
Pour écrire ça plus correctement (je ne fais pas ça pour t'embêter mais pour que tu es les bonnes méthodes et les bonnes façons de rédiger pour le futur) :
En projetant le vecteur sur l'axe
on obtient
. Autrement dit,
est la composante selon
du vecteur
.
Rédige de même pour la composante selon du vecteur
puis écris le vecteur
dans la base
.
Florian
Parfait !
Pour un tout petit peu plus de rigueur je te conseille même d'écrire :
Ainsi quand tu dériveras le vecteur par rapport au temps tu verras tout de suite ce qui dépend du temps et ce qui n'en dépend pas. (tu peux d'ailleurs en faire de même pour le vecteur
en écrivant :
)
Synthétise désormais tout cela pour exprimer le vecteur dans la base
puis déduis-en l'expression du vecteur vitesse du point M dans cette même base (tu pourras par exemple le noter
.
Florian
Oulala j'aurai jamais su que fallait mettre cos(teta) en fonction du temps , j'ai pas trop compris ce truc par conte :p
Oui, je suis d'accord avec ton expression de . Et pour
qui est fonction du temps, c'est comme
qui est fonction du temps : les pales de l'hélicoptère tourne donc
n'est pas en permanence égal à une valeur donnée.
Et attention dans ce que tu as écris, est également un vecteur ! On doit donc écrire :
Sachant que tu connais l'expression de (à nouveau, je te propose d'écrire
) il ne te reste plus qu'à appliquer ta formule. En particulier, souviens toi que :
Florian
Non, ce n'est pas cela.
Allons-y doucement. Si on a , que vaut sa dérivée ? Penses-tu vraiment qu'elle vaut 1 comme tu l'as écrit dans ton dernier message ? Je sais que tu sais faire étant donné l'exercice avec la luge que tu as posté précédemment.
Puis pour :
Tu es dans le cas où :
En appliquant la formule que je t'ai rappelée ci-dessus, que vaut alors la dérivée par rapport à de
?
Florian
Oui exactement.
Le début de l'expression de la vitesse est donc :
Les trois points sont pour le reste de l'expression qu'il te reste à établir. Essaye pour en suivant la formule que je t'ai donné et les indications de mon message à 15:33. Je te promets que ce n'est pas si dur que ça, et qu'avec un peu d'entrainement cela te deviendra complètement naturel. J'aimerais juste que tu trouves l'expression par toi même de :
et
Florian
C'est clair que pour toi ça ne peut etre que facile tu m'as l'air d'être un AS en physique
je pense que la derivée de peut etre
encors une fois je pense je me suis gouré lol
c'est surtout la fonction composé que je galère ... 
C'est une bonne première tentative mais ce n'est pas cela, ne te décourage pas cependant !
Je commence par réécrire la formule générale pour dériver une fonction composée :
Et je vais prendre un exemple pour te montrer :
Soit une fonction définie par
. Si l'on cherche à dérivée
alors on est bien dans le cas de la dérivée d'une fonction composée. En reprenant la notation ci-dessus on a plus particulièrement :
On commence donc par calculer :
On calcule ensuite
Et on peut alors exprimer :
Et on a donc au final :
Maintenant à toi de faire de même avec la fonction . N'ai pas peur du fait que la variable soit notée
au lieu de
c'est juste une habitude liée au fait que
représente le temps. Mais si tu te sens plus à l'aise avec la variable
, commence par dériver
. Suis l'exemple que je t'ai donné ci-dessus, pose bien ce que vaut
et
puis procède étape par étape comme je l'ai fait. Dans ta réponse, écrit bien tout ton développement afin que je puisse éventuellement voir où tu t'es trompé si jamais ton résultat est faux.
Florian
Il n'y a pas plus parfait que ton explication ! normalement je peux plus me trompé là !
J'espère que là c'est bon
Je crois qu'on y est presque. Que vaut plus simplement l'expression suivante :
[tex]\dfrac{d(cos(x))}{dx}
? (je suis sûr que tu connais les dérivées des fonctions usuelles)
D'accord. On a donc :
Peux-tu désormais écrire ce que vaut ? Et n'oublie pas l'indication de l'énoncé qui dit que
Tu pourras aussi déduire rapidement ce que vaut
Florian
Voilà, tu peux maintenant normalement répondre à mes questions précédentes que je rappelle ici :
Peux-tu désormais écrire ce que vaut ? Et n'oublie pas l'indication de l'énoncé qui dit que
Tu pourras aussi déduire rapidement ce que vaut
Juste un petit détail, ne mélange pas les et les
. Il faudrait que tu écrives :
Mais je suis bien d'accord avec ta conclusion :
Je rajouterais également que dans l'énoncé on te dit que on peut donc (et plutôt même, on doit) écrire :
et
Maintenant tu as tous les éléments nécessaires pour écrire le vecteur vitesse du point :
.
Oui désolé je me suis rendu compte que quelque minute après et on peut pas modifier donc c'est dommage.
Donc maintenant que j'ai le derivée de cos et sin il faut que je derive tout avec la formule , R compris c'est ça ?
Quand je derive j'obtient
Mais je crois que ma dérivée n'est pas fini , vu qu'il y a 3 produit donc j'ai fais
donc pour dabord derivée la parenthese et ensuite le resultat de la derivée , le faire dérivée avec le vecteur ex je sais pas si tu vois ce que je veux dire
Oui, normalement il faudrait faire la dérivée d'un produit. Mais cependant, on a les deux choses suivantes qui sont vraies :
car la longeur
de la pâle ne dépend pas du temps.
car
est ton repère principal.
On a donc bien :
Ou encore :
Maintenant que l'on connait l'expression du vecteur vitesse du point M, j'ai une question pour toi : sais-tu calculer la norme d'un vecteur ? Si ou calcule la norme de ce vecteur vitesse. Le résultat que tu obtiendras (qui est un scalaire) correspondra à la vitesse du point à tout instant t.
Florian

