Inscription / Connexion Nouveau Sujet
Equation de Lagrange mécanique vibratoire
Bonjour,
Après quelques mois de travail, je pense avoir enfin compris le fonctionnement de la mécanique vibratoire.
J'ai fais un exercice où il faut trouver les équations de mouvement grâce à la méthode de Lagrange.
La schéma est en image ci-dessous.
On considère que F(t)=0
J'ai trouvé comme équation de mouvement :
La masse m au centre de la plaque, est une masse ponctuelle.
Est-ce que c'est correct?
Ce sujet est un nouvel exercice, d'où le nouveau topic. Mais il est enlien avec ce topic![]() Problème mécanique vibratoire
Problème mécanique vibratoire
Merci par avance.
Laura B***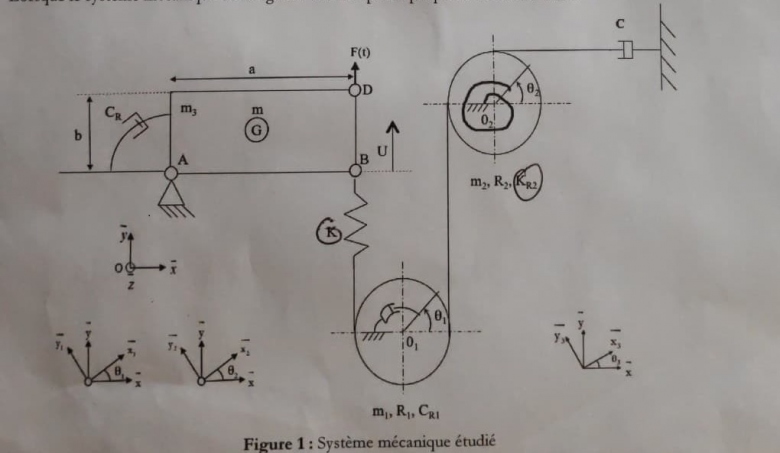
J'apporte quelques petites étapes à mes calculs.
Pour l'énergie cinétique :
La masse étant ponctuelle, l'inertie est nulle.
Bonjour
Dans le résultat que tu fourni, la somme des termes entre parenthèses que tu multiplies par la dérivée seconde de U par rapport au temps est correcte, ce qui laisse penser que tu as correctement évalué l'énergie cinétique du système. Pourtant les expression de Tm, Tm1... sont incomplètes...
Aie Aie Aie, oui en effet, j'ai totalement oublié de mettre le U ^^
Ce qui deviendrais :
Donc:
Ensuite :
Et pour finir:
La démarche est la même pour l'énergie potentielle, mais sans dérivée par rapport au temps.
Et aussi :
Est-ce que cette équation du mouvement vous semble correcte dans son intégralité ?
Merci pour tout vos conseils, car comme vous pouvez le constatez j'ai bien avancer depuis les messages de l'an passé.
Pas de problème pour les énergies cinétiques de m et m3. Pour les deux autres, tu sembles raisonner comme si le ressort de raideur K était inextensible. Le fait que le fil soit inextensible permet de poser :
mais cela ne permet pas de poser :
L'allongement (au sens algébrique du terme) du ressort est a priori non nul et a pour expression générale :
Sous réserve d'avoir bien compris le problème... Sans énoncé complet...
Autant pour moi, il est vrai que l'énoncé regorge d'informations essentielles...
Voici le sujet complet, mais il n'indique pas que le ressort est inextensible en effet, or dans tout les exercices que j'ai fait,il était considéré comme tel...
Le mouvement du système mécanique de la Fgure 1 est étudié par rapport au référentiel d'observation . Soit
la base associée à R. Le système est constitué par :
1. Un câble inextensible de masse négligeable (considérée nulle) qui relie le ressort de raideur K à l'amortisseur de constante d'amortissement C (figure 1).
2. Ce câble passe par deux poulies P1 et P2 de centre fixe O1 et O2, de masse respective m1 et m2 et de rayon respectif R1 et R2. Les poulies P1 et P2 sont respectivement reliées à un couple d'amortissement de constante Cr1 et à un couple résistif de constante Kr2 (figure 1). Les repères de base
et
de base
sont respectivement liés aux poulies P1 et P2.
3. Une plaque ab de masse m3. Cette plaque est reliée à un pivot d'axe (A,z) en A et à un couple d'amortissement de constante Cr (figure 1). Seules de petites rotations, d'angle , de la plaque autour de cet axe sont possibles. Soit
le repère lié à la plaque ab et
la base associée a R3.
4. La plaque ab est munie d'une masse ponctuelle de masse m placée au centre de masse G, et est reliée en B à un ressort de raideur K. Au point D, une action F(t) est appliquée.
Lorsque le système mécanique de la figure 1 est au repos la plaque ab est horizontale.
Il est bien question de ressort de raideur K. L'allongement de ce ressort est susceptible de varier. Tu as donc un système avec deux variables de position : U et  1. Le système est équivalent à deux oscillateurs couplés grâce au ressort.
1. Le système est équivalent à deux oscillateurs couplés grâce au ressort.
@Lauraunkut : merci pour la recopie de l'énoncé => j'ai supprimé en conséquence le message de l'ancien topic.
D'autre part, j'ai supprimé ton nom de famille de ta signature laissée en fin de message du 21-11-19 à 13:28 => en effet, même si on doit s'inscrire sur le forum pour poster un message, ces derniers restent publics et des personnes malveillantes sur le net pourraient tomber sur ton identité 
Bonsoir, du coup j'ai retravaillé sur mon exercice, mais je trouve encore et toujours la même solution. J'ai revérifier la méthodologie que nous avions dans les précédents exercices, et les résultats sont similaires. Je vais tout de même détailler ma démarche, au cas où vous pourriez m'indiquez ou se situe l'erreur.
1 - Équation d'équilibre dynamique de Lagrange :
2 - Calcul de Qi, les forces excitatrices
3 - Calcul de  l'énergie potentielle totale du système
l'énergie potentielle totale du système
avec W=0 car les forces conservatives sont négligées.
Donc on obtient :
Pour finir, on calcule T, l'énergie cinétique totale du système :
a. Calcul de Tm la masse ponctuelle :
Tm est une masse ponctuelle, donc son inertie est nulle.
On passe dans la base B.
On utilise l'hypothèse des petits déplacement :
Donc :
b . Calcul de Tm1 la poulie qui na pas de vitesse en translation
C dans le cas d'une matrice =
D'où:
c. Calcul de Tm3 la plaque.
La vitesse au point A est nulle car le point A est fixe.
C pour une plaque =
On obtient donc un T total égal à :
Ensuite :
L'équation de mouvement est donc :
Voila tout le détail de mes opérations, et franchement, je ne sais pas du tout où peut être l'erreur.
Merci par avance pour une réponse.
Pour l'énergie cinétique, tu sors vraiment l'artillerie lourde !
Chacun des trois solides est un solide en rotation autour d'un axe fixe et tu dois savoir que l'énergie cinétique dans ce cas vaut :
: le demi produit du moment d'inertie par rapport à l'axe de rotation par le carré de la vitesse angulaire. Cela donne en une ligne :
C'est bien ce que tu as fait (en beaucoup plus long) et ton expression du moment d'inertie IAz de {m1,m3} est correcte. En revanche, tu n'as pas pris en compte mon message du 21-11-19 à 15:07 : la longueur du ressort varie. On peut donc poser :
mais pas question décrire :
Tu as donc un problème à deux coordonnées généralisées indépendantes U et 1. Cela conduit à :
Je te laisse remplacer le moment d'inertie en fonction de m1,m3, a et b comme tu as déjà été capable de le faire.
Cette erreur se répercute aussi au niveau de l'énergie potentielle. L'augmentation (au sens algébrique du terme) de longueur du ressort par rapport à la position correspondant à l'absence de vibration est, comme déjà dit :
Ce qui donne comme expression de l'énergie potentielle :
Petite question pour voir si tu as bien compris : pourquoi cette expression de l'énergie potentielle, ne fait-elle pas apparaître explicitement l'énergie potentielle de pesanteur de {m1,m3}, a priori non négligeable ? Celle-ci vaut, à une constante arbitraire près :
Je te laisse réfléchir à tout cela...
Étourderie dans mon message précédent que je rectifie. Si on assimile chaque poulie à un disque homogène, son moment d'inertie par rapport à son axe de rotation est de la forme . J'ai oublié les coefficients (1/2) dans les expressions de l'énergie cinétique. J'ai aussi oublié le "point" sur U... En revanche, tu n'avais pas commis ces étourderies !

Tu l'as sans doute déduit de toi-même mais je préfère quand même préciser : l'erreur que tu as commise en considérant le ressort de longueur fixe a aussi des répercussions sur l'expression de Q.
Pas de problème sur le terme en mais il faut revoir les deux autres termes. Il doivent être exprimés en fonction de
car, comme déjà dit :
mais
Il faut bien faire attention sur le schéma aux orientations des angles. Puisque le fil est inextensible, une augmentation de 2 correspond à une diminution de 1 d'où le signe "-" ...
Bonjour,
Désolé de ma réponse si tardive, j'ai essayé d'y retravaillé dessus, en fait on finit par avoir une équation avec 5 termes différents, ;
;
;
et U.
C'est un partiel que j'ai passé, et je me disais bien que les résultats que j'avais me paraissaient trop simples. Je vais encore revoir mes cours pour repasser ce partiels, mais je n'ai pas encore les résultats.
Merci pour votre aide.

