Inscription / Connexion Nouveau Sujet
Mecanique du solide : basculement
Bonjour,
je suis en train de développer un petit moteur physique simpliste afin d'apprendre la mécanique. Je me suis occupé en dynamique des translations, des collisions et des chocs élastiques. Je m'attaque maintenant à la rotation des solides mais je n'arrive pas à modéliser certaines situations. Je vous expose donc un problème que j'ai créé et que j'essaie de résoudre en vain :
Tout les objets sont indéformables. On ce place dans un espace 2D pour simplifier le problème mais il sera généralisé en 3D.
Soit une boite carré, en contact avec le sol au point P, qui forme avec lui un angle Alpha. Cette boite à pour centre C et pour masse m.
A t=0, on lâche la boite qui ce retrouve en déséquilibre.
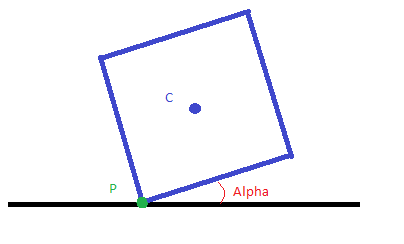
Logiquement la boite devrait effectuer une rotation autour de P, refermer l'angle Alpha et venir en contact sur le sol.
Je souhaite savoir s'il est possible de calculer cette rotation, l'accélération notamment, aux temps suivants. Puis si éventuellement on pouvait ramener cette rotation autour de P à une rotation et une translation autour de C.
En partant du principe qu'on connait la masse, j'étais partie la dessus mais je trouve aucune solution :
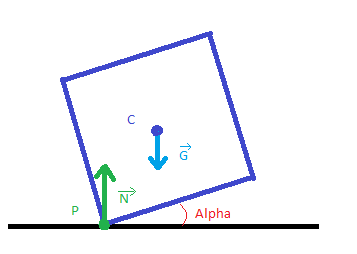
On applique le principe fondamental de la dynamique :
Somme des forces = N - G = ?
Je ne sais pas si N peut être connu, il est à priori plus petit que G.
Il y aurait donc translation du solide vers le bas
Somme des moments = CP ^ N
On ne sais toujours pas pour N mais il y aurait à priori une rotation autour de C.
Si ce raisonnement est logique, il faut avoir N pour résoudre..
Voila où j'en suis, merci de m'aider à avancer :p !

