Inscription / Connexion Nouveau Sujet
mécanique du solide
Bonjour, en cours de mécanique nous travaillons sur la mécanique du solide e ayant un partiel à la rentrée je souhaite être au point. Voici un exercice qui nous a été donné pour nous entrainer mais que je ne parvient pas à comprendre... Pouvez vous m'aider ? Merci d'avance !
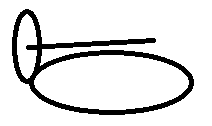
Un plateau, de rayon R, est mis en rotation, autour d'un axe (Oz), par un disque
de rayon r, qui roule sans glisser sur le pourtour du plateau.
L'axe du disque est une tige, passant par le point O1 de l'axe (Oz), parallèle au
plateau, et tournant autour de l'axe (Oz) avec une vitesse angulaire ω0.
1. Établir la relation entre ω0, la vitesse de rotation du plateau Ω et celle du
disque ω.
2. Exprimer la vitesse du point H le plus haut du disque. Cas particulier où le plateau est bloqué.
Encore merci !
bonjour,
toute l'astuce consiste à utiliser le non-glissement entre le disque et le plateau. La subtilité c'est de trouver une base dans laquelle le point de contact disque/plateau a un mouvement simple. Schématise ton système dans deux positions successives et tu verras assez bien par rapport à quelle pièce le point I (contact disque/plateau) est fixe.
Ensuite, trouve l'expression de V(I, D/P) (vitesse de glissement entre le disque et le plateau), puis le non-glissement te permettra de trouver la relation cherchée. Après ça, la question 2 ne sera qu'une formalité.
Bonnes révisions et bon courage pour ton(tes) partiel(s)
Bonsoir, je ne parvient pas à visualiser ce principe ni appliquer mes formules...
J'ai beau essayer mais je ne comprend pas cet exercice
Bonsoir nikita (référence au film de Besson ou à la série télé ?),
je vais essayer d'être plus clair.
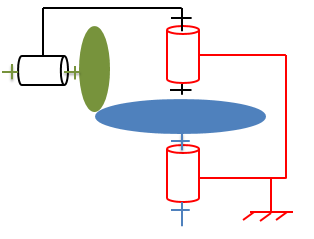
Voici ton système dans deux positions différentes :

La première chose à remarquer c'est que ton énoncé ne te dit pas explicitement que les vitesses de rotation sont exprimées par rapport à un bâti fixe (dont l'un des axes est ) qui n'est pas représenté sur mes schémas.
La seconde est que le point I, et donc H, (puisqu'ils sont diamétralement opposés) sont fixes par rapport à la tige du disque, jusque là, ça va ?
Maintenant on va chercher à exprimer le vecteur simplement.
Si tu places une base telle que l'axe
soit l'axe de la tige,
=
(qui lui est fixe), alors tu es d'accord que
?
La vitesse que tu cherches est alors :
le premier terme correspond à et le second à
. Pour calculer ces dérivées tu dois donc utiliser
Je te rappelle au cas où la formule de dérivation vectorielle : où i et j représentent deux bases différentes.
Ainsi que :
J'espère que tu y arriveras. Si ce n'est pas le cas, j'ai une autre façon de résoudre les exercices de mécaniques plus méthodique mais elle nécessite des notations plus complètes et des étapes de "préparation" avant de faire les calculs.
Bonne soirée.
Bonjour,
Qu'appelez vous I? car pour moi c'est le moment d'inertie....
et je ne comprend toujours pas, je suis désolé...
Bonsoir
déjà le point I est le point de contact entre le disque et le plateau.
Comme je dois le redire, j'ai l'impression que tu n'as pas cherché à comprendre trop longtemps puisqu'il te suffisait de relire mon premier message pour le savoir.
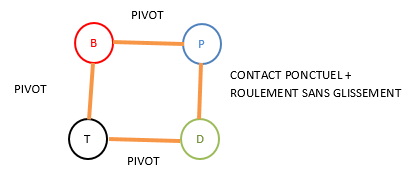
Reprenons depuis le début, voici le schéma cinématique de ton mécanisme, avec cette fois-ci, le bâti représenté :
Dans la suite j'appellerai le bâti B le disque D, le plateau P et la tige T.
le graphe des liaisons est alors :
maintenant on associe à chaque solide un repère, point + base. Pour les points, ton énoncé dit clairement que O1 est l'origine du repère du bâti et aussi celui de la tige (liaison pivot en ce point) et que l'axe z est vertical. Les deux autres axes sont choisis de façon à créer un repère orthonormé direct. Pour les autres solides je te laisse placer les repères mais je te conseille de les placer de sorte que et d'utiliser les centres du disque et du plateau comme origine de leurs repères respectifs.
Ensuite, le non-glissement entre D et P au point I implique que (se lit : vitesse de I appartenant à D par rapport à P)
On a : vient de la formule de composition des vitesses
calcul de la vitesse en I :
(on dérive dans la base de P le vecteur position de I)
de même pour (simple changement d'exposant et d'indice)
et c'est là que tu te rappelles que plus haut j'ai dit :
La subtilité c'est de trouver une base dans laquelle le point de contact disque/plateau a un mouvement simple.
(oui je m'autocite)
en fait j'aurais du dire que la subtilité c'est de trouver une base dans laquelle I est fixe. Si tu regardes à nouveau les schémas (moches faut bien le dire) que j'ai fait précédemment, tu remarques que I est fixe par rapport à T.
on arrive donc à :
on retrouve bien ce que je t'avais dit dans mon dernier message. Il ne te reste plus qu'à utiliser la formule de dérivation vectorielle qui s'écrit
maintenant il faut exprimer les différents vecteurs vitesse de rotation. J'ai dit plus haut qu'ils étaient exprimés par rapport au bâti, c'est faux dans le cas du disque qui lui est exprimé par rapport à la tige, en clair :
(si tu as nommé
voila tu as tout ce qu'il te faut pour faire les calculs alors à toi de jouer, vas-y étapes par étapes dans ton raisonnement et tu devrais y arriver.
Si tu ne comprends toujours pas essaie d'indiquer plus précisément ce que tu ne comprends pas et si tu ne comprends pas bien ces nouvelles notations, n'hésite pas à me le dire.
Bonne soirée.

