Inscription / Connexion Nouveau Sujet
donc ce serait ça
v(A/Ro) = v(A 2/R2) + v(A3/Ro)
2/R2) + v(A3/Ro)
où v(A2/R2) est la vitesse relative et v(A3/Ro) la vitesse d'entrainement
je pense avoir juste j'espère pas avoir trop d'espoir 
*** message déplacé ***
grand merci à donaldos
J'aurai sans doute d'autre question mais j'ai compris pas mal de truc et je pense pouvoir faire la suite enfin j'espère
juste la question suivante est : en déduire 2 relation scalaires entre R,d( ),,d(x),x,d(
),,d(x),x,d( ),
),
Je vais développer la relation pour trouver mais ça veut dire quoi relation scalaire ?
*** message déplacé ***
d'accord merci beaucoup pour ton aide
je suis franchement désolé pour le multi-post mais j'avais beaucoup trop mal présenté mon exercice la première fois pour qu'on puisse m'aider
je ne comprend pas un truc
on a BA = x(t).x2
si je développe j'obtiens V(A3/Ro) = d(x)/dt.x2 + x(t).d()/dt.y2
seulement A est fixé en 3 donc il ne peut pas varié selon x
ce ne serait pas plutôt l'expression de V(A2/Ro) que nous avons la
et donc pour A fixé dans 3 on aurai la distance BA fixe donc d(x) = 0
et donc V(A3/Ro) = BA.d()/dt.y2
La contradiction vient de toi : personne ne t'a demandé d'exprimé de la façon dont tu l'a fait.
Le point lié au repère
y est fixe par définition et la dérivée de
dans ce repère est par conséquent systématiment nulle. Il est inutile de développer.
en fait BA = x(t).x2 est une donnée de l'énoncé et il est nécessaire de développer et de tout exprimer dans le repère xo pour après trouver la relation scalaire
donc on a bien V(A3/Ro) = d(OA)dt /Ro
V(A3/Ro) = d(OB)dt /Ro + d(BA)/dt /Ro
V(A3/Ro) = d(BA)dt /R2 +  (R2/Ro)^BA
(R2/Ro)^BA
V(A3/Ro) = (R2/Ro)^x.x2
V(A3/Ro) = d()/dt.zo^x.x2
V(A3/Ro) = d()/dt.x.y2
est ce que c'est juste ?
j'espere que c'est ça par ce que ça correspond bien du coup car
la relation développée de V(A/Ro) = v(A2/R2) + V(A3/Ro)
correspond avec la vitesse v(A2/Ro) de votre message de 11h57 et dans le message de 13h21 vous m'avez dit que la vitesse V(A/Ro) était égale à la vitesse v(A2/Ro) donc tout semble bien s'emboiter.
Je suis super content merci beaucoup donaldos de m'avoir prêté de ton temps depuis ce matin je pense que je vais réussir la partie 2 et 3 parce que j'ai compris beaucoup de choses sinon il est pas impossible que je refasse appelle à ton aide précieuse. Au moins j'ai réussi à finir la partie 1 en espérant que mes relations scalaires soient juste mais je ne vois pas pourquoi elles le seraient pas.
Je tiens encore à te remercier grâce à toi j'ai repris espoir pour la mécanique 
Alléluia! 
Et de rien.
Une seule conclusion : ne pas hésiter à démontrer les choses soi-même. Premièrement ce n'est pas si compliqué et deuxièmement, ça évite d'appliquer bêtement une formule sans même être sûr qu'elle soit valide.
dans la partie 2 je dois déduire une relation géométrique ça veut dire quoi c'est comme une relation scalaire ?
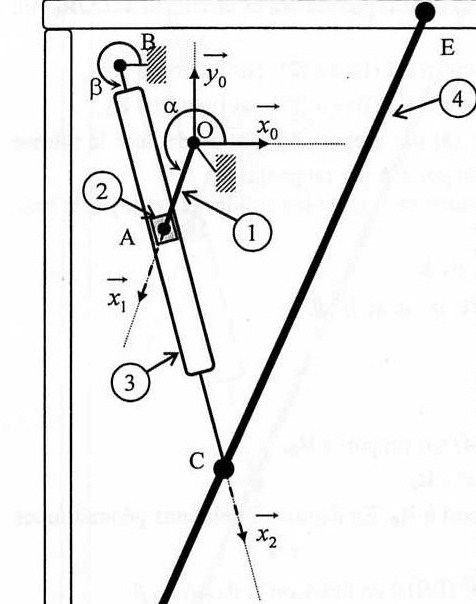
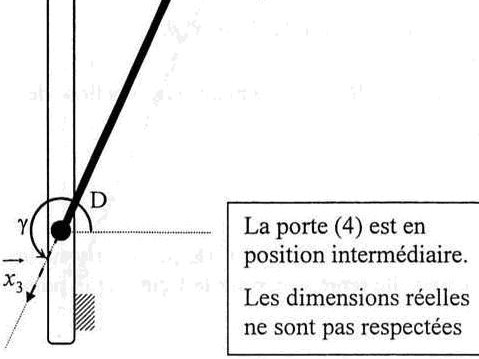
voila la figure entière et les données
OA = R.x1, BA = x.x2, OB = -L.xo + L.yo, BC = r.x2, CD = d.x3 et ED = L1.x3
dans la partie 2 on me demande
1) déterminer le vecteur rotation (4/Ro)
j'ai mis que (4/Ro) = d( )/dt.zo
)/dt.zo
2) déterminer la vitesse V(C/Ro)
j'ai mis V(C/Ro) = d(OC)/dt /Ro = d(OB)/dt /Ro + d(BC)/dt /Ro
V(C/Ro) = d(BC)/dt /R2 + (R2/Ro)^BC
V(C/Ro) = d()/dt.zo^r.x2
V(C/Ro) = d()/dt.y2
3) déterminer les vitesses V(D/Ro) et V(E/Ro)
de la même façon que précédemment j'obtiens
V(D/Ro) = V(C/Ro) + d(CD)/dt /Ro
V(D/Ro) = d()/dt.y2 + d(CD)/dt /R3 + (R3/Ro)^CD
V(D/Ro) = d()/dt.y2 + d()/dt.zo^d.x3
V(D/Ro) = d()/dt.y2 + d()/dt.d.y3
V(E/Ro) = d(OC)/dt /Ro + d(CD)/dt /Ro + d(DE)/dt /Ro
V(E/Ro) = V(D/Ro) + d(DE)/dt /Ro
V(E/Ro) = V(D/Ro) + d(DE)/dt /R3 + (R3/Ro)^DE
V(E/Ro) = V(D/Ro) + (R3/Ro)^DE
V(E/Ro) = V(D/Ro) + d()/dt.zo^(-L1.x3)
V(E/Ro) = V(D/Ro) - d()/dt.L1.y3
V(E/Ro) = d()/dt.y2 + d()/dt.d.y3 - d()/dt.L1.y3
je dois maintenant en déduire une relation géométrique entre r, d, L, d()/dt, , d()/dt,
voila si vous pouviez regarder ce que j'ai fait jusque ici et m'aider pour la relation ce serait très gentil merci d'avance