Inscription / Connexion Nouveau Sujet
composition des mouvements
bonjour,
voilas j'ai commencé mon devoir de mécanique mais je n'arrive pas à faire la suite de l'exercice.
Quelqu'un pourait-il me corriger si besoin ce que j'ai deja fait et m'aider pour le reste de l'exercice merci d'avance.
probleme
Un roulement à billes est constitué de :
Un bague intérieure 1,
Une bague extérieure 2,
Un ensemble de billes, dont la bille 3,
Une cage 4
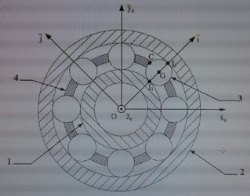
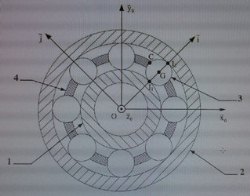
La fonction de la cage 4 - dont l'allure donnée sur la figure suivante n'est pas
exactement conforme à la réalité - est de maintenir deux billes consécutives à distance l'une de l'autre au cours du fonctionnement du roulement. Mais il existe des effets nuisibles liés à la présence de cette cage, dont le phénomène de glissement entre cage et billes qu'on étudie ici. On désigne par :
R0(O, x0, y0, z0) le repère associé au bâti 0,
R1(O, x1, y1, z1 z0) tel que 01 (x0,x1) (yo,y1) le repère associé à la bague intérieure 1 en liaison pivot d'axe (O,z0) (O, z1)
avec le bâti 0.
R2(O, x2, y2,z2 z0) tel que 02 (x0, x2) (yo, y2) le repère associé à la bague extérieure 2 en liaison pivot d'axe (O,z0) (O,z2)avec le bâti 0.
R3(G, x3,y3, z3 z0) tel que 03 (x0,x3) (yo, y3) le repère associé à la bille 3, qui
roule sans glisser sur 1 en I1 et sur 2 en I2 et dont on peut considérer qu'elle est en
liaison pivot d'axe (G, z0) (G, z3)
avec la cage 4.
R4(O, x4, y4,z4 z0) tel que 04 (x0,x4) (yo, y4)le repère associé à la cage 4 en
mouvement de rotation d'axe (O, z0)par rapport au repère R0.
image 1
Pour faciliter les calculs, on définit le repère R(O, i, j,z0) tel que, à tout instant , le vecteur i possède la même direction et le même sens que le vecteur OG. Ce repère n'est lié à aucun solide en particulier et ne sert qu'à exprimer simplement les différents termes cinématiques évoqués dans l'énoncé. On pose :
image 2
ce que j'ai fait image 3.
Questions :
1) déterminer les torseurs cinématiques Tc(1 / 0)- d'abord exprimé au point O puis au
point I1 - et Tc(2 /0)- d'abord exprimé au point O puis au point I2 - en fonction des
paramètres i r et i et des vecteurs unitaires nécessaires.
2) En utilisant les conditions de roulement sans glissement de 3 sur 1 au point I1 et de 3 sur 2 au point I2, établir les expressions des vecteurs V(I1 3 / 0) et V(I2 3 / 0) en fonction des paramètres i r et i et des vecteurs unitaires nécessaires.
3) En déduire l'expression de 3 en fonction de r1, 1, r2 et 2 .
4) Déterminer V(G 3 / 0) en fonction de r1, 1, r2 et 2 et du ou des vecteurs unitaires
nécessaires.
5) Déterminer la vitesse de glissement de la bille 3 par rapport à la cage 4 au point C en
fonction de r1, 1, r2 et 2 et du ou des vecteurs unitaires nécessaires.


bonjour,
voilas j'ai commencé mon devoir de mécanique mais je n'arrive pas à faire la suite de l'exercice.
Quelqu'un pourait-il me corriger si besoin ce que j'ai deja fait et m'aider pour le reste de l'exercice merci d'avance.
probleme
Un roulement à billes est constitué de :
Un bague intérieure 1,
Une bague extérieure 2,
Un ensemble de billes, dont la bille 3,
Une cage 4
La fonction de la cage 4 - dont l'allure donnée sur la figure suivante n'est pas
exactement conforme à la réalité - est de maintenir deux billes consécutives à distance l'une de l'autre au cours du fonctionnement du roulement. Mais il existe des effets nuisibles liés à la présence de cette cage, dont le phénomène de glissement entre cage et billes qu'on étudie ici. On désigne par :
R0(O, x0, y0, z0) le repère associé au bâti 0,
R1(O, x1, y1, z1=z0) tel que téta01=(x0,x1) =(yo,y1) le repère associé à la bague intérieure 1 en liaison pivot d'axe (O,z0) (O, z1)
avec le bâti 0.
R2(O, x2, y2,z2 =z0) tel que téta02=(x0, x2)=(yo, y2) le repère associé à la bague extérieure 2 en liaison pivot d'axe (O,z0) =(O,z2)avec le bâti 0.
R3(G, x3,y3, z3=z0) tel que téta03=(x0,x3)=(yo, y3) le repère associé à la bille 3, qui
roule sans glisser sur 1 en I1 et sur 2 en I2 et dont on peut considérer qu'elle est en
liaison pivot d'axe (G, z0)=(G, z3)
avec la cage 4.
R4(O, x4, y4,z4=z0) tel que téta04=(x0,x4)=(yo, y4)le repère associé à la cage 4 en
mouvement de rotation d'axe (O, z0)par rapport au repère R0.
image 1
Pour faciliter les calculs, on définit le repère R(O, i, j,z0) tel que, à tout instant , le vecteur i possède la même direction et le même sens que le vecteur OG. Ce repère n'est lié à aucun solide en particulier et ne sert qu'à exprimer simplement les différents termes cinématiques évoqués dans l'énoncé. On pose : image 2
ce que j'ai fait image 3.
Questions :
1) déterminer les torseurs cinématiques {Tc(1 / 0)}- d'abord exprimé au point O puis au
point I1 - et {Tc(2 /0)}- d'abord exprimé au point O puis au point I2 - en fonction des
paramètres ri et wi et des vecteurs unitaires nécessaires.
2) En utilisant les conditions de roulement sans glissement de 3 sur 1 au point I1 et de 3 sur 2 au point I2, établir les expressions des vecteurs V(I1 3 / 0) et V(I2 3 / 0) en fonction des paramètres ri et wi et des vecteurs unitaires nécessaires.
3) En déduire l'expression de W3 en fonction de r1, W1, r2 et W2 .
4) Déterminer V(G 3 / 0) en fonction de r1, W1, r2 et W2 et du ou des vecteurs unitaires nécessaires.
5) Déterminer la vitesse de glissement de la bille 3 par rapport à la cage 4 au point C en
fonction de r1, W1, r2 et W2 et du ou des vecteurs unitaires nécessaires.


*** message déplacé ***
 3/0 puisque ces deux vitesses sont forcément reliées par une relation faisant intervenir la rotation instantanée du solide
3/0 puisque ces deux vitesses sont forcément reliées par une relation faisant intervenir la rotation instantanée du solide
