Inscription / Connexion Nouveau Sujet
Vitesse par rapport a un repere - Solide indeformable
 eaudemer
eaudemerBonjour Bonsoir,
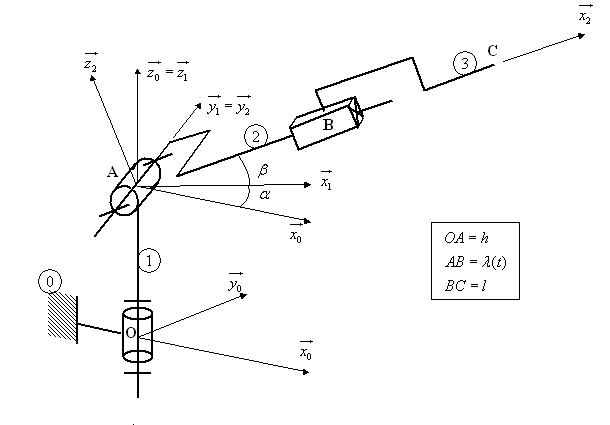
Je lis depuis tout a l'heure mais je n'arrive pas a comprendre comment faire pour Calculer la vitesse du point C par rapport à R0 par dérivation directe, par la distribution de vitesse, je comprends par la méthode de dérivation mais pas celle de distribution de vitesse. Voici la réponse du corrigé si quelqu'un pouvait me dire pour quoi on fait comme cela:
^ : veut dire produit vectoriel.
V(B dans 2/R)=V(A dans 2/R)+ Omega(2//R))^^vec(AB) = (\dot{a}z1+\dot{B}y1)^lambda x2
= (\dot{a}z1+\dot{B}y1)^lambda(cosBx1-sinBz1)
=lambda \dot{a} cos B y1 - lambda \dot{B}(cosBz1+sinBx1)
=lambda \dot{a} cos B y1 - lambda \dot{B}z2
Composition vitesses (expliquez moi cette formule svp) :
V (B dans 3 /R) = V(B dans 3 /2) + V( B dans 2/ R)
= \dot{lambda} x2 + lambda \dot{a}cosB y1-lambda \dot{B} z2
et enfin
V(C dans 3 / R) = V(B dans 3/R) + \Omega ( 2/R) ^ BC
Je dois vraiment comprendre tout ça  si quelqu'un aurait la gentillesse de m'expliquer ce serait vraiment bien s'il vous plait. Mercii!!
si quelqu'un aurait la gentillesse de m'expliquer ce serait vraiment bien s'il vous plait. Mercii!!
J'ai eu du mal avec les notiations, voici en un peu plus claire:
V(B dans 2/R)=V(A dans 2/R)+ Omega(2//R))^(AB) = (z1+
y1)^lambda x2
= (z1+
y1)^lambda(cosBx1-sinBz1)
=lambda cos B y1 - lambda
(cosBz1+sinBx1)
=lambda cos B y1 - lambda
z2
Composition vitesses (expliquez moi cette formule svp) :
V (B dans 3 /R) = V(B dans 3 /2) + V( B dans 2/ R)
= x2 + lambda
cosB y1-lambda
z2
et enfin
V(C dans 3 / R) = V(B dans 3/R) + \Omega ( 2/R) ^ BC
Hello
Il serait dommage que ce sujet fasse ... plouf ...
Calcul direct:
Distribution des vitesses:
Et du fait de la liaison 3/2:
Donc tu retrouves bien:
Vitesse d'entrainement (pour éviter les confusion je vais appeler B' le point coïncident à B, fixe dans 2:
Es tu "remis à flot"? (ou en selle comme tu veux)
(J'ai relu une fois sans trouver de coquille, cela ne veut pas dire qu'il n'y en a pas : latex + étourdi =  )
)
Hello
Il serait dommage que ce sujet fasse ... plouf ...
Calcul direct:
Distribution des vitesses:
Et du fait de la liaison 3/2:
Donc tu retrouves bien:
Vitesse d'entrainement (pour éviter les confusion je vais appeler B' le point coïncident à B, fixe dans 2:
Es tu "remis à flot"? (ou en selle comme tu veux)
(J'ai relu une fois sans trouver de coquille, cela ne veut pas dire qu'il n'y en a pas : latex + étourdi =
)Bonsoir, je vous remercie pour votre réponse! (Et aussi pour toutes les fois ou vous avez repondu a mes posts sur le forum) je comprends mieux maintenant.

Il n'y a pas de quoi ...
Cependant il y a effectivement 2 coquilles (erreur de signe et/ou copier/coller malheureux dans mes expressions Latex) je ne trouve pas tout à fait le même résultat en faisant le calcul vectoriel
Une saute aux yeux comme un coup de pied au derrière, c'est le  dans la composante verticale de la vitesse, qui devait en fait être un (+1), l'autre pour la trouver, il va falloir que je sorte un papier et un crayon ...
dans la composante verticale de la vitesse, qui devait en fait être un (+1), l'autre pour la trouver, il va falloir que je sorte un papier et un crayon ...
Bon alors je synthétise, histoire de laisser un post bien rangé (tu n'hésite pas cependant si nouvelles questions) :
En posant
On a
En dérivant par rapport au temps, on obtient
L'approche cinématique
1ere distribution des vitesses:
(1)
Avec (liaison charnière 2/3)
Mouvement d'entrainement:
(2)
2eme distribution de vitesse:
(3)
Avec:
Donc en injectant (2) et (3) dans (1)
Soit
soit aussi
Ce qui amène le même résultat que le calcul "direct":
PS: la 2ème petite coquille était cachée dans l'expression de la vitesse angulaire qui est
(et non pas + comme on l'écrit quand on est pas concentré)

