Inscription / Connexion Nouveau Sujet
Travail personnel ' Mécanique rationnelle"
Bonjour ,
Dans cet exercice, j'ai quelques difficultés.
Exercice :
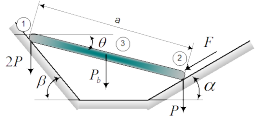
Soit une barre de poids Pb de longeur L, posée sur deux plans inclinés des angles  et
et .Deux charges , 2P et P sont appliquéées respectivement aux extrémités de la barre 1 et 2. Déterminez la force F pour que le système soit en équilibre. Déterminez les réactions des plans.
.Deux charges , 2P et P sont appliquéées respectivement aux extrémités de la barre 1 et 2. Déterminez la force F pour que le système soit en équilibre. Déterminez les réactions des plans.
j'attend la réponse merci d'avance.
Bonjour
j'ai essayé de resoudre le travail mais je suis bloqué de trouver l'angle entre vecteur de reaction pour la reaction 1 et l'axe x ou l'axe y.
je commance par :
 F=0
F=0
Hello
Comme ce que tu recherches c'est la condition d'équilibre sur F, tu peux considérer que les réactions R1 et R2 sont perpendiculaires aux supports, donc font respectivement des angles et avec la verticales (si je lis bien ton dessin)
somme des forces = vecteur nul, te donneras 2 équations contenant R1 et R2.
Il t'en faudra donc une 3eme: tu l'obtiens en écrivant que la somme des moments doit également être nulle
Bonsoir
Rien n'est dit sur la nature des contacts entre les extrémités 1 et 2 de la barre et les plans inclinés. En supposant l'absence de frottement, on peut considérer R1 perpendiculaire au plan incliné donc faisant un angle avec la verticale. Raisonnement analogue pour R2. Dans ces conditions, les composantes des vecteurs forces sur l'axe des x et l'axe des y sont respectivement :
R1x=R1.sin() ; R1y=R1.cos()
R2x=-R2.sin() ; R2y=R2.cos()
Fx=-F.cos() ; Fy=-F.sin()
Écrire la relation fondamentale de la statique va te conduire à deux équations pour trois inconnues (je suppose les trois angles connus).
Tu obtiens une troisième équation en appliquant le théorème du moment statique à l'extrémité 2 de la barre (ou en tout autre point).
Sous toutes réserves... Sans énoncé complet ...
Hello vanoise,
aucune raison d'être désolé! Je propose de laisser Mohamed1999 gérer tout en gardant un oeil attentif: 
Merci . pour la réponse , qu'on je fait la somme du force je trouve 2 équation a 3 inconnue
donc on vas faire la somme du moment .
la somme du moment par rapport a point 1 = en general la distance kross la force .
et puis la distance par exemple du point 1 vers 2
dy=sin( )
) a.
a.
et
dx=cos()a.
et je trouve les resultat suivant :
R1=
la 1er équation:
R2cos(+)-Fsin[+]=cos()[]
R2cos()-Fsin()=
et je suis bloqué ici.
Donc:
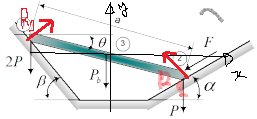
1)
Donne, en projection sur les 2 axes Ox et Oy:
2)
Détaillons cette expression en O
Je propose d'appeler B le point d'appui de gauche et A celui de droite
Du fait du choix des axes, le sens positif de rotation est le sens anti-horaire
(chouette...)
Je te laisse poursuivre? (et peut être vérifier que je n'ai pas fait de boulettes dans le calcul des angles + les copier/coller Latex ... ça arrive!)
Si le produit vectoriel ne t'est pas familier:
Salut dirac,
Il me semble que tu as croisé les cotés 1 et 2 de la poutre dans tes équations ...
Dans le dessin de l'énoncé, le coté 1 est à gauche et le coté 2 est à droite
Sauf distraction. 
Hello J-P,
MERCI!
Je reprends donc:
- à ma gauche: le point B, la réaction R1 et angle
- à ma droite: le point A, la réaction R2 et angle
Les équations / somme des moments nulle me semblent OK, par contre celles / somme des forces nulles étaient erronées
donne, en projection sur les 2 axes Ox et Oy:

