Inscription / Connexion Nouveau Sujet
Régulateur de Bouasse et Sarda
Bonjour,
Je suis confus à propos de mes réponses concernant quelques questions d'un problème de mécanique des solides intitulé régulateur de Bouasse et Sarda.
Voici l'énoncé :
Un solide , de centre d'inertie O, comporte un arbe lié rigidement à une manivelle OA, dont le bras de levier est noté a, et à une poulie de rayon R. Ce solide peut tourner autour d'un axe horizontal fixe par rapport au référentiel terrestre, supposé galiléen. On note J le moment d'inertie de
par rapport à son axe de rotation ; on repère sa position par l'angle
du bras de la manivelle par rapport à la verticale descendante Ox. Sur la poulie est acccroché un fil inextensible, de masse négligeable et ne glissant pas sur la poulie, dont l'autre extrémité est fixée à une masse m. La manivelle entraîne en A, une bielle de masse négligeable et de longueur
, dont l'autre extrémité coulisse sur l'axe vertical Ox, de sorte que le mouvement de M peut être décrit par une abscisse X, comptée positivement vers le bas, et choisie nulle lorsque,simultanément, le ressort n'est pas tendu et
. La longueur b de la bielle est supposée grande devant la longueur a de la manivelle ( angle entre
et l'axe vertical Ox est ainsi très petit). L'ensemble est soumis au champ de pensanteur :
.
On néglige toute forme de frottement.
Il est demandé d'exprimer l'allongement du ressort en fonction des paramètres X et  et de montrer, en moyennant certaines approximations qu'il faut préciser, que le moment par rapport à l'axe Oy des efforts s'exerçant sur le système constitué par le solide
et de montrer, en moyennant certaines approximations qu'il faut préciser, que le moment par rapport à l'axe Oy des efforts s'exerçant sur le système constitué par le solide et la masse m se réduit à :
Vu qu'on nous a donné la réponse, il m'a été plus facile de la retrouver et je ne saurai dire si mon raisonnement est correct.
L'allongement du ressort est la somme de l'allongement à partir de la partie supérieure et inférieure. Pour la partie inférieure on a un allongement qui est égal à X (vu qu'on à X=0 à la position où le ressort n'est pas tendu). Et toujours en cette position de X=0 où le ressort n'est pas tendu on a OB=a+b car =0. Donc l'allongement de la partie supérieure est égal aux variations de la longueur OB,et ces variations sont égales à : =
or donc :
. Seulement ces deux allongements se font suivant deux directions diffèrentes on peut donc pas les sommer directement mais avec un signe " - " pour
puisque l'axe Ox est dirigé vers le bas. On obtient ainsi l'allongement total :
Pour le moment par rapport à l'axe , il faut calculer le moment en O ( pour annuler le moment de la liaison ) et de le projeter sur l'axe Oy.
Le moment de la liaison en O est nul puisque O est centre de liaison. Le moment du poids de la poulie en O est nul aussi car O est centre d'inertie de la poulie. Vu les masses négligeables des tiges OA et AB on néglige les moments de leurs poids.
Le moment en O de la masse m : =
Et vu que le ressort applique une force sur la tige AB , alors celle-ci appliquera en retour la même force en A sur la tige OA( vu que les masses sont négligeables et qu'il n'y a pas de frottements ) qui appartient au système .
Seulement si on écrit la force de rappel du ressort au point d'application sur la masse M , on a :
et donc
est la force de rappel du ressort au point B ( et donc au point A ).
Et le moment de cette force au point O est :
Et après un simple produit scalaire donne le résultat demandé.
J'espère que vous pourrez m'aider si quelqu'un remarque des lacunes quelque part.
Et merci de prendre la peine de lire et de me rectifier le raisonnement s'il y'a quelque chose d'incorrect.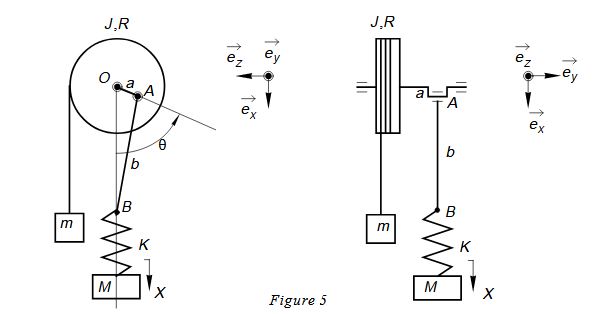
Bonjour
Pour l'expression de l'allongement, pour être un peu plus rigoureux, il suffit de dire qu'au premier ordre près : cos( )=
)= 1 ; tu connais surement le développement limité de ce cosinus au voisinage de =0.
1 ; tu connais surement le développement limité de ce cosinus au voisinage de =0.
Le calcul du moment me parait très bien compte tenu de l'énoncé. Il y a tout de même une grosse approximation derrière tout cela : écrire que l'action du fil sur ( ) est égal au poids de m revient à considérer le produit (masse .accélération) de m négligeable devant le poids mg. Cela n'est pas certain en cas de mouvement de rotation de () de vitesse angulaire importante...
) est égal au poids de m revient à considérer le produit (masse .accélération) de m négligeable devant le poids mg. Cela n'est pas certain en cas de mouvement de rotation de () de vitesse angulaire importante...

