Inscription / Connexion Nouveau Sujet
moment dynamique d'un solide en rotation
Bonjour je vous poste tout d'abord le sujet sur le quel je travaille:
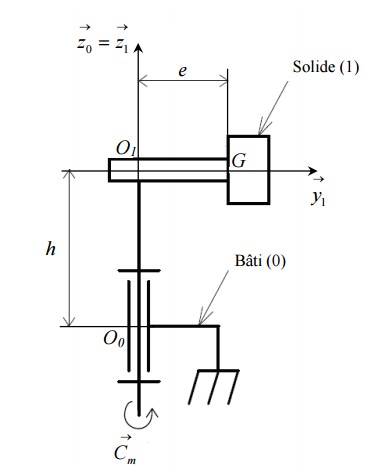
Le référentiel R0 est considéré comme galiléen ; il est rapporté au repère
(O0, x0 ,y0, z0) . Le
référentiel absolu R0 est associé au bâti (0).
On note R1 le référentiel rapporté au repère orthonormé direct
(O1,x1,y1,z1) tel que z1=z0. Le repère R1 , lié rigidement au solide (1), se déduit à chaque instant de R0 par une rotation d'angle θ
autour de l'axe O0 z0 .
Un solide (1) de masse m et de centre de gravité G, défini par O1G=ey1 , est en liaison pivot d'axe
O0z0 , supposée parfaite, avec le bâti (0). Il est entraîné en rotation autour de l'axe O0z0 par
rapport au bâti (0) grâce à un couple moteur Cm=Cm z0.
On note g= − g z0 l'accélération de la pesanteur.
On donne O0 O1= h z0 et O1G=ey1 .
La matrice d'inertie du solide (1) dans le repère ) (O1,x1,y1,z1) est : I1(O1)= .
1. Exprimer dans R1 la vitesse ) (V∈1/ 0) du point G appartenant au solide (1) par rapport
au bâti (0).
2. Exprimer dans R1 l'accélération ) Γ( G∈1/ 0) du point G appartenant au solide (1) par
rapport au bâti (0).
3. Exprimer dans R1 le moment cinétique LO[sub]1[/sub](1/0) du solide (1) par rapport au bâti (0) au point O1 .
4. Exprimer dans R1 le moment dynamique dL0[sub]1[/sub](1/0) /dt du solide (1) par rapport au bâti (0)
au point O1.
3.5 En déduire le couple moteur Cm=Cmz0 nécessaire à la mise en rotation du solide (1) en
fonction de l'accélération angulaire θ'' .
A la question 4 j'ai calculé le moment dynamique avec deux méthodes mais j'obtiens deux résultats différents: la première avec le moment de O1 par rapport à g l'accération de pesanteur me donne -emgx1. La deuxième méthode en dérivant le moment cinétique me donne
Du coup j'obtiens comme couple moteur Cm=C ''z0.
''z0.
J'aimerais savoir où est ma faute dans le calcul du moment des forces extérieures car j'ai simplement appliqué la formule du cours.
Merci d'avance.