Inscription / Connexion Nouveau Sujet
Mécanique du solide: Cinétique
Bonjour,
J'ai un exercice à faire mais je n'y arrive pas.
Soit le repère lié au support fixe (0) d'un bras de robot. Le solide (1) est en rotation par rapport à (0), autour de l'axe
, ce mouvement est paramétré par l'angle \psi. Le repère
est lié au solide (1). On note que
. Le solide (2) est en translation par rapport à (1) dans la direction
. Le repère
est lié au solide (2). On note que
.
Données utiles: ,
,
(x(t): variable, a et b: constantes)
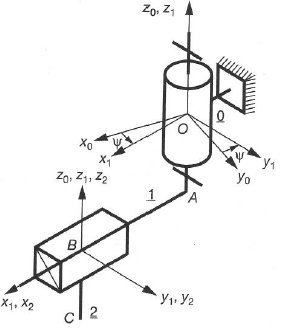
1.Représenter la figure plane (paramètre ).
Réussi
2.Exprimer le vecteur position en fonction de
et
.
D'après la relation de Chasles, on a:
3.Déterminer par la loi de distribution des vitesses.
4.Déterminer par dérivation d'un vecteur position.
Car ici, on a une translation
5.Déterminer par la loi de compositions des vitesses.
6.Déterminer par la loi de distribution des vitesses.
Car translation
7.Déterminer par la loi de compositions des vitesses.
Je suis bloqué pour les autres questions pour déterminer les vecteur de taux de rotation.
Merci d'avance pour vos aides,
bonjour
4) attention, il y a translation de (2) par rapport à (1) donc depend de t
(translation ne signifie pas vitesse nulle, mais rotation nulle!)
Bonjour krinn,
Merci pour votre réponse.
Or, (car il y a une translate de (2) par rapport à (1).
Et, (car fixe au repère
)
Est-ce bien ça ?
Merci d'avance,
il manque un terme dans la dérivée:
dx/dt x1
et ce terme nest pas nul si la vitesse de translation nest pas nulle
(il est clair que la vitesse de B nest pas nulle dans R1)
récapitulons:
4)  B(R2/R1) = dx/dt x1
B(R2/R1) = dx/dt x1
5 ) B(R2/R0) = dx/dt x1 + x d /dt y1
/dt y1
6) on peut remarquer que BC est un vecteur constant donc...
(vecteurs en gras)
sauf erreur
Bonjour Krinn,
Merci pour vos aides.
J'ai une question s'il vous plait.
Dans quel cas utilise-t-on ces formules de la base mobile ?
1)
et
2)
Merci,
c'est  R1/Ro dans la formule
R1/Ro dans la formule
en fait c'est la meme formule.
La 1) est la version simplifiée de 2) quand le vecteur est constant dans R1
Merci pour votre réponse.
Est-ce qu'un vecteur constant signifie qu'il est fixe dans le référentiel ?

