Inscription / Connexion Nouveau Sujet
Mécanique du Solide
Bonjour,
J'ai un exercice à faire mais je suis bloqué à partir de la question 1.3.
Exercice 1 : Matrices d'inertie
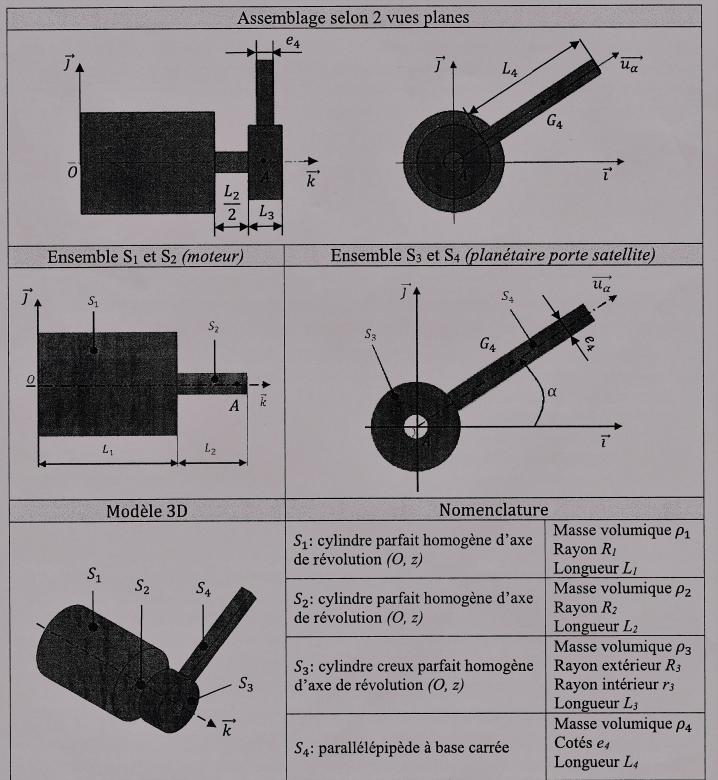
Le système S étudié est l'union des éléments S_i pour i=1 à 4 tel que . Le repère orthonormé direct
de l'étude est fixe et tel que
soit sur l'axe de révolution
.
L'ensemble S est animé d'un mouvement de rotation autour de l'axe paramétré par la fonction scalaire
définie sur l'une des représentations géométriques planes. Le repère
lié à S est aussi orthonormé direct.
Données vectorielles : A centre d'inertie du cylindre creux .
1.1 Sans effectuer de calcul, exprimer et justifier la structure de la matrice d'inertie des solides et
dans la base
, au point O. Ces matrices seront appelées
,
et
.
La matrice d'inertie est de la même forme pour tous les solides. Nous avons un solide de révolution suivant z donc la matrice d'inertie est diagonale tel que : E = D = F = 0 et A=B.
Soit
1.2.Déterminer, par le calcul intégral, l'expression littérale du moment d'inertie par rapport à l'axe de révolution de chaque cylindre en fonction de ses dimensions et de sa masse volumique puis en fonction de la masse
de chaque élément.
a) Moment d'inertie de
avec
Soit
b) Moment d'inertie de
Soit
c) Moment d'inertie de
[Soit
1.3. Soit le centre d'inertie de
dont le vecteur position est donnée dans l'énoncé. Sans effectuer de calcul, exprimer et justifier la structure de la matrice d'inertie de
dans la base
. Cette matrice sera appelée
.
1.4.Déterminer, par le calcul intégral, l'expression littérale du moment d'inertie par rapport à l'axe de révolution
. Ce moment sera noté
a) En fonction des dimensions et du matériau.
b) En fonction de la masse de l'élément.
1.5.A partir du vecteur du théorème de Huygens, déterminer l'expression littérale du moment d'inertie de la matrice
par rapport à l'axe de rotation
, au point O, dans la base
. Ce moment sera noté
Merci d'avance pour vos aides,
Bonsoir
S4 est un parallélépipède rectangle homogène. La matrice d'inertie en G4 est diagonale car les trois axes sont les axes principaux d'inertie. Tu peux trouver le calcul des trois moments d'inertie ici (notations à adapter) :
![]()
La matrice d'inertie en O peut se déduire du théorème de Huyghens. Tu as aussi un calcul direct ici (notations à adapter) :
![]()

