Inscription / Connexion Nouveau Sujet
mecanique
bonjour
je dois déterminer le vecteur rotation  (1/Ro)
(1/Ro)
c'est a dire le vecteur rotation de la pièce 1 par rapport au repère Ro
si vous pouviez m'indiquer la formule cela serait vraiment gentil merci d'avance voici la figure
tu peux m'expliquer comment tu as trouvé ça parce que dans un exercice similaire j'ai aussi écrit ce résultat mais dans mon cour il y a comme une formule alors je sais pas si je dois le marquer comme ça ou bien utiliser la formule
la formule est = 1/2 (x^d(x)/dt + y^d(y)/dt + z^d(z)/dt)
La formule générale de ton cours se simplifie pour donner la formule indiquée par gbm dès que l'on a une rotation autour d'un axe repérée par un seul angle.
Je ne pense pas que tu sois tenu(e) de démontrer ce résultat quand tu souhaites l'utiliser.
ok merci beaucoup
maintenant je dois calculer la vitesse V(A/Ro)
voila ce que j'ai fait
OA = R x1 par donnée (vecteur x1)
V(A/Ro) = d(OA)/dt = R*d(x1)/dt
x1 = -sin( )xo + cos()yo
)xo + cos()yo
donc V(A/Ro) = R*d(x1)/dt = -R*d()/dt * (sin()xo + cos()yo)
je pense avoir juste
c'est pour la question suivante que je bloque :
déterminer la vitesse V(A 2/Ro) du point A appartenant à 2 (fixé à(2)) par rapport à Ro
2/Ro) du point A appartenant à 2 (fixé à(2)) par rapport à Ro
en fait je ne vois pas la différence avec la question précédente
merci d'avance
je n'ai toujours pas trouvé et j'ai vraiment besoin d'aide
J'en suis arrivé à dire que
V(A/Ro) = V(A2/Ro)
est ce que c'est juste?
OA = R.x1 par donnée
V(A/Ro) = d(OA)/dt = R*d(x1)/dt
Juste ici, je suis d'accord.
x1 = -sin()xo + cos()yo
donc V(A/Ro) = R*d(x1)/dt = -R*d()/dt * (sin()xo + cos()yo)
NON! On ne projette pas le vecteur x1 ! Utilise le th de changement de base de dérivation
merci mais je ne vois pas du tout ce que c'est le théorème de changement de base de dérivation
et je me suis trompé dans ma projection
x1 = sin()yo + cos()xo
j'ai un autre problème si j'utilise la formule  = ^OA
= ^OA
je trouve pas pareil que si je fais la dérivée du vecteur OA pour obtenir la vitesse
qu'est ce qui cloche je commence a désespérer ça fait depuis le début de l'aprem que je me bas avec la première question de mon devoir maison
merci beaucoup gbm
je crois que je n'arrive pas a projeter x1 si vous pouviez me dire le résultat de cette projection ce serait gentil
merci d'avance

ah d'accord
mais ça ne change rien parce qu'on a
V(A/Ro) = R.d(x1)/dt = R.^x1 = R.d()/dt.zo^x1
il faut bien que j'écrive x1 dans la base xo,yo,zo pour faire le produit vectoriel
il faut bien que j'écrive x1 dans la base xo,yo,zo pour faire le produit vectoriel
oui sauf qu'écrire x1 = cos(a)xo + .... est bcp plus long que d'utiliszr ce th.
Donc
v(A/Ro) = R.dalpha/dt.y1
ok je crois que j'ai compris
maintenant c'est pour déterminer la vitesse V(A2/Ro) du point A appartenant à 2 (fixé à(2)) par rapport à Ro
sachant que le solide 2 est lié au point A et peut tourner autour de ce point. Il peut également se translater suivant x2 dans la glissière du solide 3
Je ne comprend pas parce que pour calculer v(A/Ro) on utilisait le vecteur x1 mais maintenant on utilise quel vecteur???
Je suis perdu
merci
et le produit vectoriel de zo^x1 ça ne fait pas -y1 ?
parce que du coup on aurrai v(A/Ro) = -R.dalpha/dt.y1
non apres avoir reussi ma projection je trouve bien v(A/Ro) = R.dalpha/dt.y1
est que tu vous pouvais m'aider pour la suite s'il vous plait
bonjour
maintenant c'est pour déterminer la vitesse V(A2/Ro) du point A appartenant à 2 (fixé à(2)) par rapport à Ro
sachant que le solide 2 est lié au point A et peut tourner autour de ce point. Il peut également se translater suivant x2 dans la glissière du solide 3
Je ne comprend pas parce que pour calculer v(A/Ro) on utilisait le vecteur x1 mais maintenant on utilise quel vecteur???
et en fait je ne comprend pour pour V(A/Ro)
parce que (1/Ro)^R.x1 = R.d()/dt.zo^(cos().xo+sin().yo)
= - R.d()/dt.(cos().yo+sin().xo)
alors que si je fait la dérivé du vecteur OA j'obtient
d(OA)/dt = R.d(x1)/dt = R.d(cos().xo+sin().yo)
= R.d()/dt.(cos().xo-sin()yo) = R.dalpha/dt.y1
pourquoi ça ne donne pas le meme résultat ?
merci d'avance
bonjour
voici les données
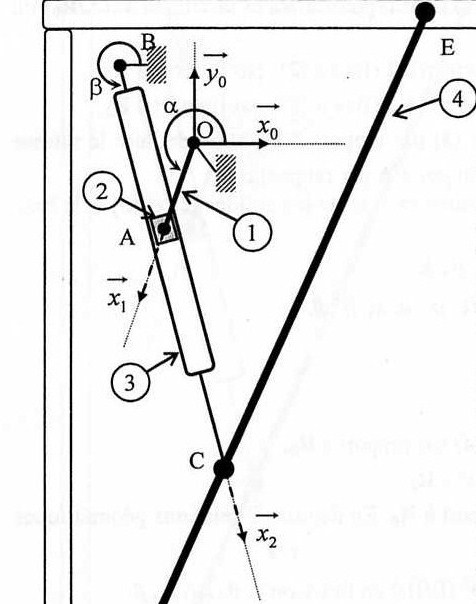
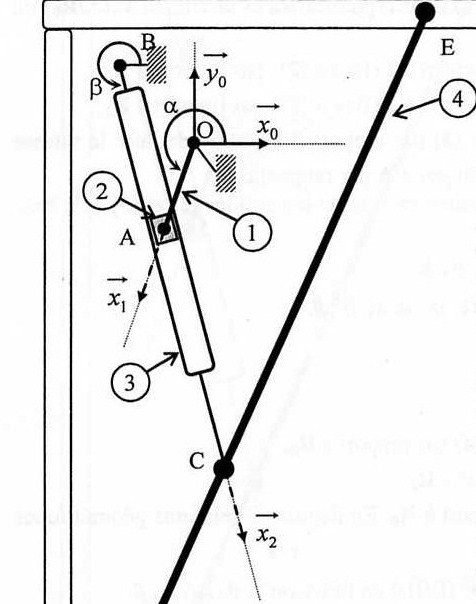
soit Ro (O,xo,yo,zo) le repère fixe du système
le solide 1 possède un mouvement de rotation uniforme autour du point O. La base R1 (O,x1,y1,z1) est liés à ce solide tel que = (xo,x1)
Le solide 2 est lié au solide 1 au point A et peut tourner autour de ce point. Il peut également se translater suivant x2 dans la glissière du solide 3.
Le solide 3 est composé de la glissière et de la barre BC. Il et en mouvement de rotation autour du point B. La base R2 (B,x2,y2,z2) est lié ç ce solide tel que  = (xo,x2)
= (xo,x2)
La figure est ci dessous
première question : déterminer la vitesse V(A2/Ro) du point A appartenant à 2
J'ai marqué que V(A2/Ro) = d(OA)/dt/R1 + (R1/R0)^OA.x1
Je pense avoir faux parce que ça me ramène à l'expression de V(A1/Ro)
voila merci de toute aide j'en ai vraiment besoin
*** message déplacé ***
Tu peux peut-être calculer cette vitesse en te basant sur un autre repère...
Quel est le but de l'exercice?
*** message déplacé ***
le but de l'exercice est de déterminer la vitesse du solide 4 par rapport à Ro
la premiere question on demande de trouver V(A/Ro)
j'ai fait V(A/Ro) = d(OA)/dt = R.d(x1)/dt = R.d(cos().xo+sin()yo)
V(A/Ro) = R.d()/dt.(-sin().xo+cos()yo)
maintenant on me demande de trouver V(A2/Ro) pour moi les deux vitesses sont égales
*** message déplacé ***
Même si les deux points ont le même mouvement dans , rien ne t'empêche d'utiliser la formule de dérivation par rapport à un repère différent de
.
Par exemple:
*** message déplacé ***
d'accord mais on me demande calculer la vitesse V(A2/R2) dans la question suivante donc c'est plutôt la que je devrais utiliser cette relation ?
Il n'y a pas un autre moyen de calculer cette fameuse vitesse V(A2/Ro) avec la vitesse V(A/Ro) que l'on a calculé juste avant?
*** message déplacé ***
Je pense que l'on perdrait moins de temps si tu nous donnait d'emblée l'ensemble des questions.
*** message déplacé ***
dans les données on a BA = x(t).x2
est ce que V(A2/R2) = d(x(t))/dt.x2 ? car la dérivé de x2 est nulle puisque c'est un vecteur unitaire du repère R2
merci
*** message déplacé ***
d'accord
1) déterminer le vecteur rotation (1/Ro) de la piece 1 par rapport à Ro et la vitesse V(A/Ro) du point A par rapport à Ro
2) déterminer la vitesse V(A2/Ro) du point A appartenant à 2 par rapport à Ro
3) determiner la vitesse V(A2/R2) du point A appartenant à 2 par rapport à R2
4) déterminer le vecteur rotation du point A appartenant à 3 du pont A par rapport à Ro
5) écrire la relation vectorielle de composition des vitessees en A entre les solides 2 et 3 et la base de référence Ro
*** message déplacé ***
pour la question j'ai oublié de marquer qu'il faut n déduire la vitesse V(A3/Ro)
désolé
*** message déplacé ***
Le solide 1 étant relié au solide 2 par le point A, la vitesse de est la même que celle de
.
En revanche, ne coïncide avec
et
qu'à un instant donné. puisque les différentes liaisons autorisent un déplacement de la pièce 2 par rapport à la pièce 3.
Il ne te reste qu'à calculer en te rappelant que
est nécessairement fixe dans
.
*** message déplacé ***
voila ce que je propose
V(A3/Ro) = V(A2/R2) + (R2/Ro)^BA
V(A3/Ro) = d(x)/dt.x2 + d()/dt.zo^x.x2
V(A3/Ro) = d(x)/dt.x2 + x.d()/dt.y2
c'est juste ?
*** message déplacé ***
non je me corrige je pense avoir faux
V(A3/Ro) = V(A2/R2) + (R2/Ro)^OA
V(A3/Ro) = d(x)/dt.x2 + d()/dt.zo^R.x1
V(A3/Ro) = d(x)/dt.x2 + R.d()/dt.y1
c'est juste ?
*** message déplacé ***
je pense mettre encore planté 
V(A3/Ro) = V(A3/R2) + (R2/Ro)^OA
V(A3/Ro) = 0 + d()/dt.zo^R.x1
V(A3/Ro) = R.d()/dt.y1
J'espère que c'est la bonne cette fois ci 
*** message déplacé ***
bonjour
est ce que je peux utiliser la formule
V(A/Ro) = V(A/R1) + (R1/R2)^OA
si Ro et R1 non pas une origine commune?
*** message déplacé ***
A ton avis?
Reviens à la définition de la vitesse par rapport à un repère donné...
*** message déplacé ***
Je pense qu'il faut qu'il faut nécessairement que les repères ai une origine commune mais j'espère me tromper
Sinon bien je ne sais pas du tout
*** message déplacé ***
ma première égalité était très similaire sauf que A était lié à Ro du coup je ne vois franchement pas comment m'en sortir puisque je peux pas décomposer car R2 et Ro non pas la même origine
ou alors je projette x2 dans Ro ?
*** message déplacé ***
après avoir regardé longuement le dessin et cette phrase de l'énnoncé : Le solide 3 est composé de la glissière et de la barre BC. Il et en mouvement de rotation autour du point B. La base R2 (B,x2,y2,z2) est lié ç ce solide tel que = (xo,x2)
J'en ai déduit que v(A3/Ro) = (R2/Ro)^OA.x1
v(A3/Ro) = d()/dt.zo^OA.x1
v(A3/Ro) = d()/dt.OA.y1
est ce que c'est juste ?
*** message déplacé ***
Oui, et pour arriver à l'expression que tu donnes dans ton premier post, il faut écrire:
Dès lors ta question de départ devient:
Sous quelle condition l'égalité est-elle vérifiée?
Normalement, tu es en mesure de répondre toi-même maintenant...
*** message déplacé ***
A la condition que O soit l'origine du repère R1 ?
j'ai répondu dans l'autre post mais je dois encore avoir faux je pense
*** message déplacé ***
pour quelle question j'ai juste pour la réponse à la question de ce topique ou pour ma réponse quant au calcul de V(A3/Ro) dans l'autre topique?
grand merci en tout cas
*** message déplacé ***
Tu vas trop vite!
Là encore, pars de la définition de la vitesse du point A (lié au solide 3) et développe, tu verras que tu as commis une erreur et que la formule que tu utilises n'est pas applicable.
*** message déplacé ***
v(A3/Ro) = d(OA)/dt /Ro
v(A3/Ro) = d(BA)/dt /R2 + R2/Ro^BA
j'espère vraiment avoir juste cette fois ci
*** message déplacé ***
Tu sautes une étape de calcul (qui consiste a décomposer en
et à remarquer que le vecteur
est fixe dans
) mais tu obtiens le bon résultat cette fois.

*** message déplacé ***
merci énormément donaldos
pour la question
5) écrire la relation vectorielle de composition des vitesses en A entre les solides 2 et 3 et la base de référence Ro
il faut que je décompose un vecteur pour avoir la décomposition du mouvement puis après je dérive pour avoir la décomposition des vitesses
mais je ne trouve pas quel vecteur décomposer afin de relier le solide 2 et 3?
*** message déplacé ***
A ce stade, soit tu redémontres la formule de composition des vitesses (je ne t'en empêcherai pas...  ), soit tu l'appliques.
), soit tu l'appliques.
Je ne suis pas sûr du résultat qui est attendu dans cette question mais parmi les vitesses que tu as calculé: une correspond à une vitesse d'entraînement, une autre correspond à une vitesse relative donc...
*** message déplacé ***

