Inscription / Connexion Nouveau Sujet
Cinématique d'un manège
Bonjour, voilà deux ans que je n'ai pas fais de physique et j'ai deux exercices sur la cinématique et je ne comprend rien du tout, j'espère que vous pourrez m'aider à travers cet exercice, à comprendre le cours et à faire cet exercice.
Voici le premier exercice :
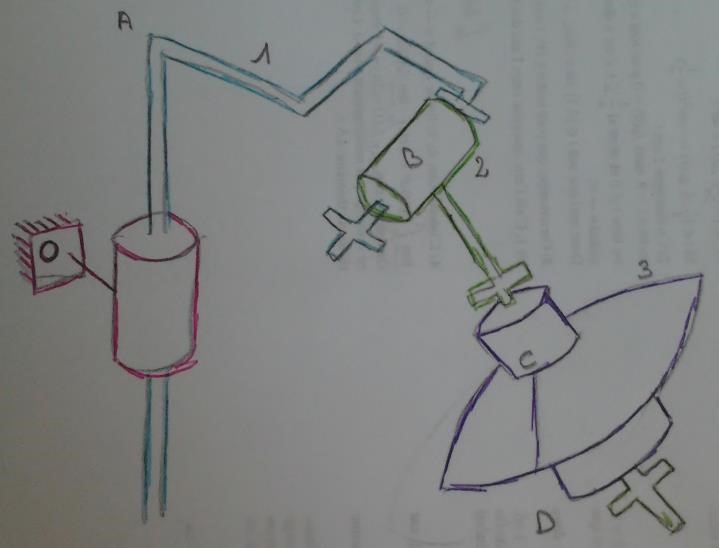
L'image représente le schéma cinématique d'un manège.
La potence (1) est en liaison pivot glissant avec le bâti (0).
Le balancier (2) est en liaison pivot avec la potence (1).
La nacelle (3) est en liaison pivot avec le balancier (2).
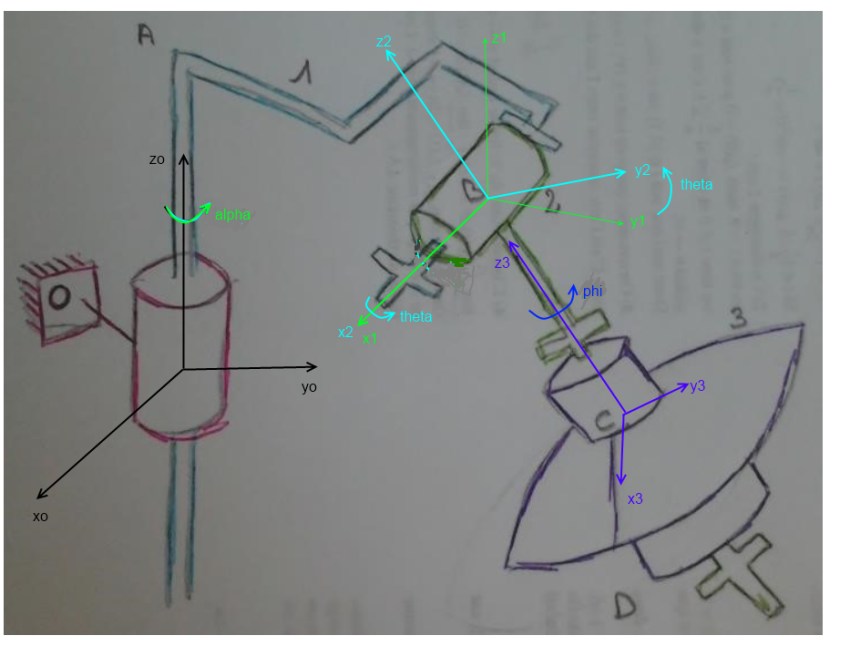
Le repère orthonormé direct et galiléen R0(O, x0, y0, z0) (mes points x, y et z sont des vecteurs), fixe est lié au bâti (0), (O, z0) est vertical, c'est l'axe de rotation de la potence (1) par rapport au bâti (0).
Le repère orthonormé R1(B, x1, y1, z1 = z0) est lié à la potence (1), (B, x1) est l'axe de rotation du balancier (2) par rapport à la potence (1).
Le repère orthonormé R2(B, x2 = x1, y2, z2) est lié au balancier (2), (C, z2) est l'axe de rotation de la nacelle (3) par rapport au balancier (2).
Le repère orthonormé R3(C, x2, y3, z3 = z2) est lié à la nacelle (3).
Les trois liaisons sont motorisées et peuvent être décrites grâce aux variables suivantes :
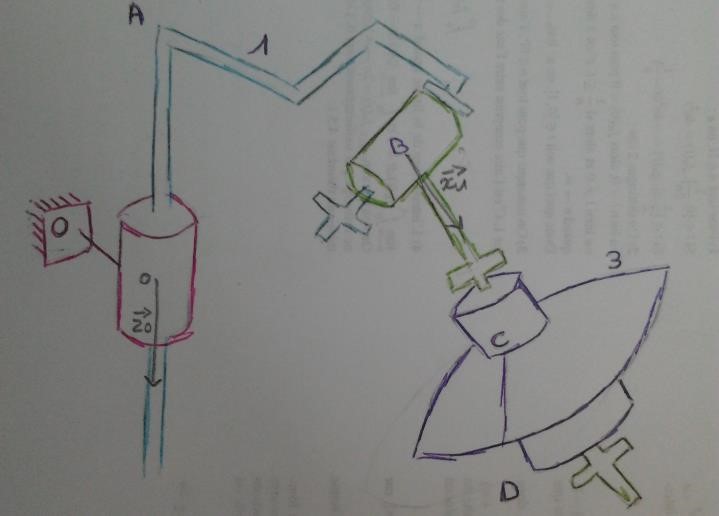
 (t) est la variable de translation du mouvement de la potence (1) par rapport au bâti (0) : OA = (t)z0.
(t) est la variable de translation du mouvement de la potence (1) par rapport au bâti (0) : OA = (t)z0.
 (t) est l'angle de précession qui définit la rotation d'axe (O, z0) de la potence (1) par rapport au bâti (0).
(t) est l'angle de précession qui définit la rotation d'axe (O, z0) de la potence (1) par rapport au bâti (0).
 (t) est l'angle de nutation qui définit la rotation d'axe (B, x1) du balancier (2) par rapport à la potence (1).
(t) est l'angle de nutation qui définit la rotation d'axe (B, x1) du balancier (2) par rapport à la potence (1).
 (t) est l'angle de rotation propre qui définit la rotation d'axe (C, z2) de la nacelle (3) par rapport au balancier (2).
(t) est l'angle de rotation propre qui définit la rotation d'axe (C, z2) de la nacelle (3) par rapport au balancier (2).
On définit de plus les dimensions fixes :
L est le porte à faux de la potence : vecteur AB = Ly1
H est la longueur du balancier : vecteur BC = -Hz2
R est le rayon de la nacelle : vecteur CD = Rx3
Questions :
1) Représenter sur la figure les différents repères du problème.
2) Donner les expressions de :
x1 et y1 dans le repère R0
y2 et z2 dans le repère R1
x3 et y3 dans le repère R2
3) Exprimer le torseur cinématique de la potence (1) dans son mouvement par rapport au bâti (0) en A. Vous exprimerez les éléments de ce torseur dans le repère R0.
4) Exprimer le torseur cinématique de la potence (1) dans son mouvement par rapport au bâti (0) en B. Vous exprimerez les éléments de ce torseur dans le repère R1.
5) Exprimer le torseur cinématique du balancier (2) dans son mouvement par rapport à la potence (1) en B. Vous exprimerez les éléments de ce torseur dans le repère R1.
6) Exprimer le torseur cinématique du balancier (2) dans son mouvement par rapport à la potence (1) en C. Vous exprimerez les éléments de ce torseur dans le repère R2.
7) Exprimer le torseur cinématique de la nacelle (3) dans son mouvement par rapport au balancier (2) en C. Vous exprimerez les éléments de ce torseur dans le repère R2.
8) Exprimer le torseur cinématique de la nacelle (3) dans son mouvement par rapport au balancier (2) en D. Vous exprimerez les éléments de ce torseur dans le repère R3.
9) Exprimer le torseur cinématique de la nacelle (3) dans son mouvement par rapport au bâti (0) en C. Vous exprimerez les éléments de ce torseur dans le repère R1.
10) En déduire l'expression de la vitesse du point D dans le mouvement de la nacelle (3) par rapport au bâti (0). Vous exprimerez cette vitesse dans le repère R1
Je vous remercie grandement par avance de votre aide car je suis tout juste capable de débuter cet exercice !
Si vous trouvez des exercices similaires sur internet, je serais heureuse que vous me les transmettiez pour que je puisse les travailler.
Merci pour votre aide, maintenant pouvez vous m'expliquer comment vous avez fait pour placer ces repères ?
comment savez vous que x1 se trouve bien là ou vous l'avez placer ?
Je suis désolée mais je ne comprend pas comment vous avez fait et je devrais surement refaire le meme type d'exercice dans les prochains DM donc j'aimerai comprendre !
Le repère orthonormé R1(B, x1, y1, z1 = z0) est lié à la potence (1),
z1 et z0 sont donc confondus
donc on connait x1 et z1, il suffit de compléter avec y1 pour avoir un trièdre direct
Bonjour,
je suis arrivée à faire les deux premières questions mais je bloque complètement pour les suivantes !
pour la question 3) si j'ai bien compris je dois exprimer TA(potence/bâti) ?
dans ma définition d'un torseur TA(potence/bâti) =
{ (potence/bâti)
(potence/bâti)
{vecteur V(potence/R0)
mais comment je calcule le et le V ?
merci par avance de votre aide
le mouvement de la potente (1) est la combinaison d'une translation selon zo et d'une rotation autour de l'axe (O,zo)
on te demande les éléments du torseur cinématique de (1) en A:
OA = (t)z0 donc  (A)|Ro = ...
(A)|Ro = ...
d'autre part:
(t) est l'angle de précession qui définit la rotation d'axe (O, z0) de la potence (1) par rapport au bâti (0).donc le vecteur rotation
(1)/Ro = ...
