Inscription / Connexion Nouveau Sujet
Charge soulevée par une grue
Bonsoir,
En travaillant un exercice de dynamique, je me suis trouvé incapable de répondre à une question. J'ai jeté un coup d'oeil alors à la solution , mais malheureusement, je n'ai rien compris.
Voici l'énoncé de l'exercice :
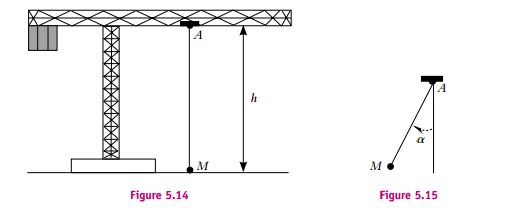
Une grue de chantier, de hauteur h doit déplacer d'un point à un autre du chantier une charge M de masse m supposée ponctuelle.
On appelle A le point d'attache du câble sur le chariot de la grue.
1. Le point A est à la verticale de M posée sur le sol. Déterminer la tension du câble lorsque M décolle.
2. L'enrouleur de câble de la grue remonte le câble avec une accélération av constante. Déterminer la tension du câble. Conclusion.
3. La montée de M est stoppée à mi-hauteur mais le chariot A se met en mouvement vers la droite (figure 5.15) avec une accélération horizontale ah constante.
a) Quelle est l'accélération de M sachant que M est alors immobile par rapport à A?
b) Déterminer l'angle que fait le câble avec la verticale en fonction de m, g, ah ainsi que la tension du câble.
Voici la solution proposée pour la question 3)a-: On note O un point fixe dans le référentiel.
L'accélération de M est . On utilise la relation de Chasles
, or
est un vecteur constant, donc .
J'avoue que je n'ai rien compris à la solution. On a supposée que le référentiel lié au sol est galiléen. Le système de masse m assimilée à son centre de gravité M repéré par ses coordonnées cartésiennes M(x,y,z) où Oz est dirigé vers le haut. Mais pourquoi ? Aussi pourquoi
est constant et
??
J'espère que vous puissiez m'aider. Cette solution m'a l'air pure hérésie.
Bonjour
Cette solution m'a l'air pure hérésie.
Manifestement, l'auteur du corrigé a confondu dérivée et dérivée seconde...
Il suffit de dire que, sûrement après quelques oscillations amorties non étudiées ici, l'angle
 garde une valeur constante. La masse M est donc immobile par rapport au chariot. Par rapport à la terre, M a ainsi la même accélération que le chariot. Applique la RFD à M, soumise à son poids et à la tension du fil. La projection de cette relation sur deux axes conduit à : tan()=ah/g.
garde une valeur constante. La masse M est donc immobile par rapport au chariot. Par rapport à la terre, M a ainsi la même accélération que le chariot. Applique la RFD à M, soumise à son poids et à la tension du fil. La projection de cette relation sur deux axes conduit à : tan()=ah/g.Bonsoir,
Merci pour votre réponse. Puis-je savoir de quels axes parlez-vous s'il vous plait ? Aussi, j'ai trouvé quelques résultats mais je n'en suis pas sûr . Voici ma solution pour la question 3 :
J'ai déplacé l'origine du repère en A, et j'ai travaillé en base polaire.
On a alors où d est la distance constante entre A et M . On trouve alors
. Comme le point M a une accélération horizontale constante alors :
donc d'où l'accélération angulaire est nulle. On conclut donc en remplacant la vitesse angulaire par son expression que le vecteur accélération est égal au vecteur de l'accélération horizontale.
On trouve aussi en appliquant le RFD et en projetant sur le vecteur que
et en projetant sur le vecteur
que
.
Je ne sais si ma méthode est juste ni les résultats corrects.
J'espère que vous puissiez m'aider encore une fois.
Je vous suis reconnaissant !
Merci d'avance !
Suivant axe horizontal
T.sin ()=m.ah
Suivant axe vertical
T.cos ()=m.g
Rapport membre à membre
tan ()=ah/g
Je suppose que vous avez pris le repère (xAy) avec l'axe (Ax) descendant avec la verticale et (Ay) perpendiculaire à (Ax) et dirigé dans le sens de ?

