Inscription / Connexion Nouveau Sujet
Calcule angle avec des mesures de capteur inertiel
Bonsoir,
J'ai effectué un test pour mesurer l'inclinaison dans des conditions statiques avec un capteur inertiel qui était composé d'accéléromètre, de gyroscope et de magnétomètre.
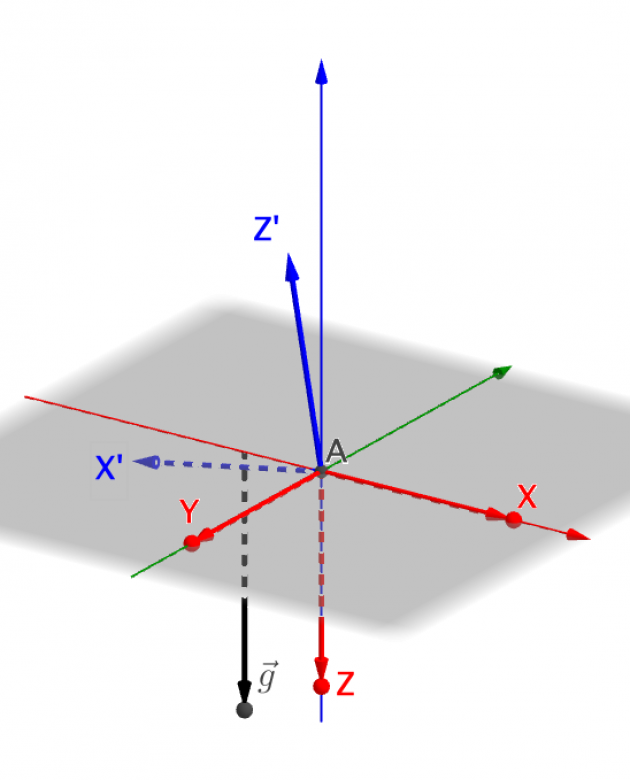
Sur ce test, j'ai mis le capteur inertiel en sorte que l'axe Z soit à la vertical et les deux autres à l'horizontale.
Je souhaite donc calculer l'angle sur les 3 axes et observer si l'axe Z se rapproche de 90° et les deux axes se rapprochent de 0°.
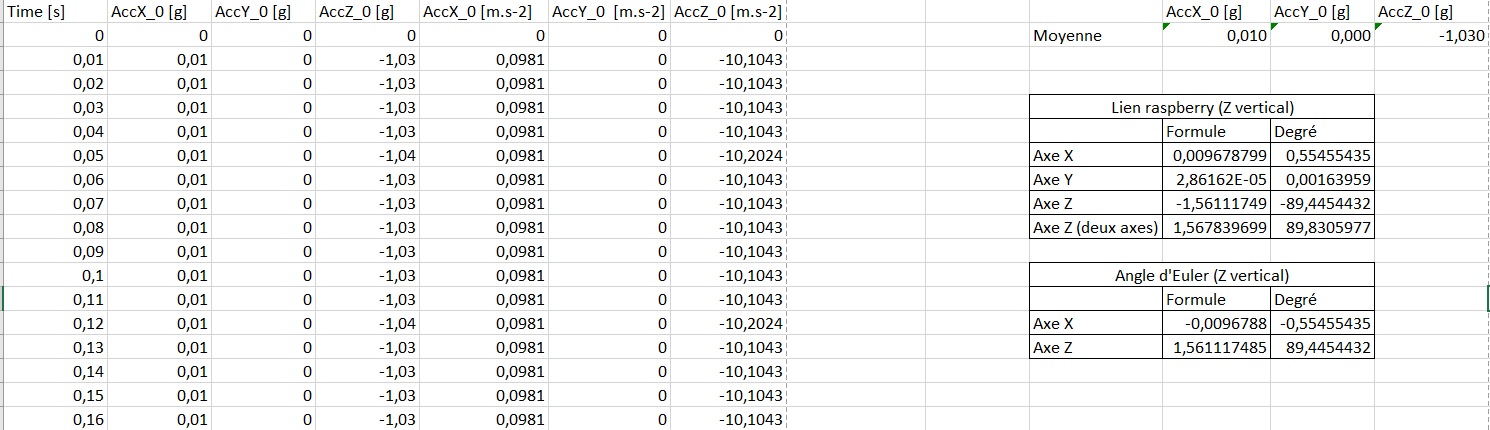
A la suite des mesures, j'ai obtenu des accélérations en [g], des vitesses angulaires et les données du magnétomètres calibré en degré.
Pouvez vous m'aider à passer les valeurs de l'accéléromètre en angle et aussi m'aider à intégrer la vitesse angulaire pour avoir aussi l'angle pour connaitre les deux façons.
merci d'avance pour votre aide,
Pour déterminer les angles, voir : ![]()
Pour ce qui est de l'intégration de la vitesse angulaire, sur le papier, c'est simple, si vous faites des mesures tous les  t,
t,  (t+t)=(t)+
(t+t)=(t)+ (t)*t. En pratique, cela ne marche que moyennement bien, le plus gros problème étant une dérive de .
(t)*t. En pratique, cela ne marche que moyennement bien, le plus gros problème étant une dérive de .
Qu'utilisez-vous comme matériel/logiciel : il y a des bibliothèques de "fusion" qui compense les défauts du gyroscope par l'accéléromètre et réciproquement.
J'utilise un nouveau capteur inertiel qui me sort des données sur excel. La formule pour l'angle d'euler me donne un angle. Est ce que je dois l'utiliser pour les 3 axes tout en modifiant les données ?
J'ai vu un site qui utilise la même formule cependant ils enlèvent le - sur le ax
http://www.siloged.fr/docs/raspberry/index.html?MesurerunangleMPU6050.html
Bonjour,
Pour Euler c'est compliqué, la définition dépend de l'ordre selon lequel on fait les rotations, et la formule dépend de l'angle considérée, et pour finir on ne peut en calculer que 2, puisqu'une rotation initiale autour de z est indétectable.
Votre lien raspberry calcule les trois angles de la même manière : ce sont les angles de l'axe par rapport au plan horizontal, pas Euler donc. Si cela vous convient, pourquoi pas ?
Dans le même lien, il fait bien le calcul de l'angle par intégration des données du gyroscope avec un peu de "fusion".
Vous parlez de deux façons, mais il y en a une troisième le magnétomètre. Pour l'utilisation voir : ![]()
Bonjour,
Je n'ai jamais vu ce genre de chose en cours donc comment vous dire que je suis un peu paumé. Pour l'instant, je vais me concentrer sur l'accéléromètre pour calculer l'angle.
Si j'utilise Euler pour mon cas, je peux calculer l'axe Z (vertical) et l'axe X (horizontal). J'utilise la même formule pour les deux tout en changeant les valeurs c'est à dire pour l'axe X je garde la même formule que le lien et pour l'axe Z, je mets l'az sur le numérateur et ay/ax sur le dénominateur.
Pour le lien avec raspberry, j'utilise donc les formules qu'il me conseille pour calculer les angles.
J'ai mis mon fichier ci-joint. Je comprends pas pourquoi on rajoute un négatif au numérateur sur la méthode d'euler. Et cela change donc les signes sur les résultats sur les deux méthodes.
Ca amène donc le capteur a donner soit des valeurs plus élevé ou plus faible suivant la technique utilisée.
Bonjour,
Pour une définition lisible des angles d'Euler, voir : ![]()
Pour les expériences, il faudrait incliner un peu plus pour que cela soit plus parlant.
Dans le cas de votre test ay=0, donc l'axe y est resté horizontal, cela veut dire que dans le cadre des angles d'Euler, en commençant par rotation autour de z indétectable ( inconnu), il y a eu une seule rotation autour de y (), et vous ne mesurez donc qu'un angle (la rotation autour de x,
inconnu), il y a eu une seule rotation autour de y (), et vous ne mesurez donc qu'un angle (la rotation autour de x,  est nul), sinon y ne serait plus horizontal. Pour ce qui est du signe, vous avez vu que les calculs supposent
est nul), sinon y ne serait plus horizontal. Pour ce qui est du signe, vous avez vu que les calculs supposent , autrement dit z vertical descendant et si l'on tourne dans le sens trigo (
>0) autour de y (donc de z vers x), ax est négatif, d'où le signe moins. (on remarque d'ailleurs que 0,55 est le complémentraire de 89,44, il y a bien un seul angle.
Pour Euler, inconnu, nul cohérent avec et
.
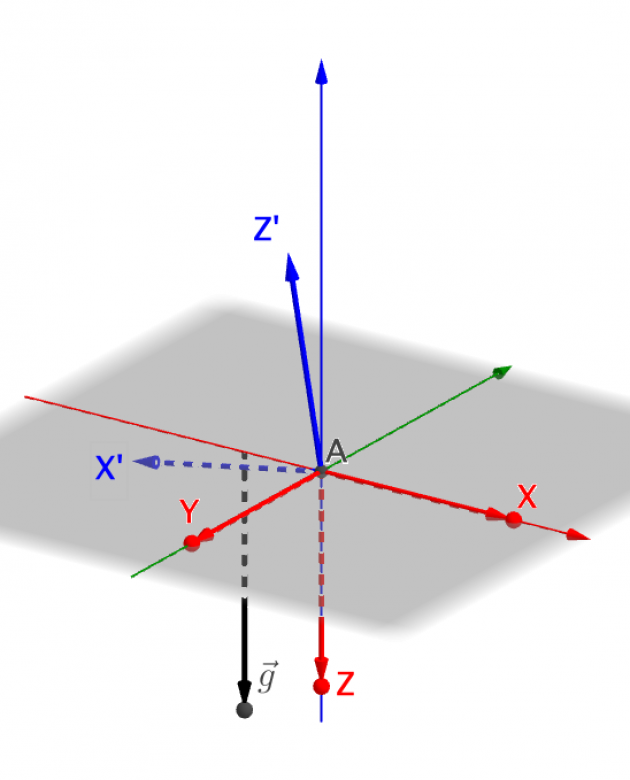
Dans votre expérience, XYZ est le repère initial avec z vers le bas, on tourne de 190° de z vers x, on obtient az<0 et ax>0 et sin()<0, cohérent.
C'est quoi Axe Z (deux axes) ?