Inscription / Connexion Nouveau Sujet
Une trajectoire circulaire plane
Bonjour, j'ai du mal avec un exercice...
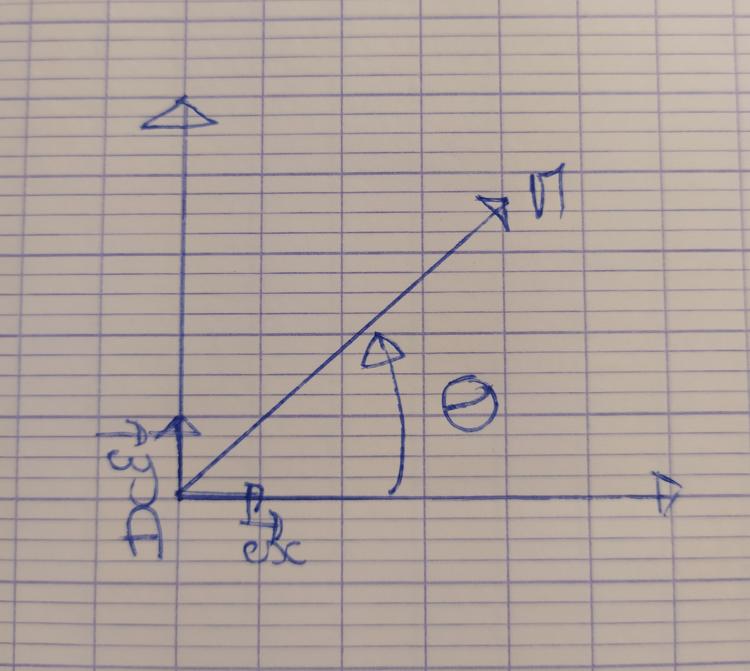
Soit R un référentiel et R (O,ex,ey,ez) un repère cartésien associé R. Dans ce référentiel R, le point M décrit une trajectoire circulaire dans le plan (O,ex,ey), de rayon R0 et de centre A.
1 .Donner l'équation cartésienne de la trajectoire de M par rapport à R dans le repère R.
2 .Proposer un repère, R′, cartésien de R plus pratique pour décrire la trajectoire. Que devient l'équation cartésienne dans ce repère ? La vitesse angulaire du point M autour du point A est donnée par ω(t). Cette vitesse suit la loi suivante : ω=ω0sinαt, où α et ω0 sont des constantes positives. Àt=0, M est sur (A,ex).
3 .Décrire la trajectoire sous forme paramétrique en fonction du temps, dans les repères R,R′ et en coordonnées polaires associées à R′.
4 .Quelle partie du cercle le point M décrit-il ?
5 .Que vaut la vitesse de M par rapport à R, calculée et exprimée dans les trois repères proposés à la question précédente ?
6 .En quel point et en quel instant, l'accélération est-elle la plus importante?
1.(x-xA)^2 + (y-ya)^2 = Ro2
2.R'(A,ex,ey)
AM = x'.ex + y'.ey
OM = OA + AM
Donc x = xa+ x'
y = ya + y'
Donc l'équation cartésienne devient :
x'^2+y'^2 = Ro^2
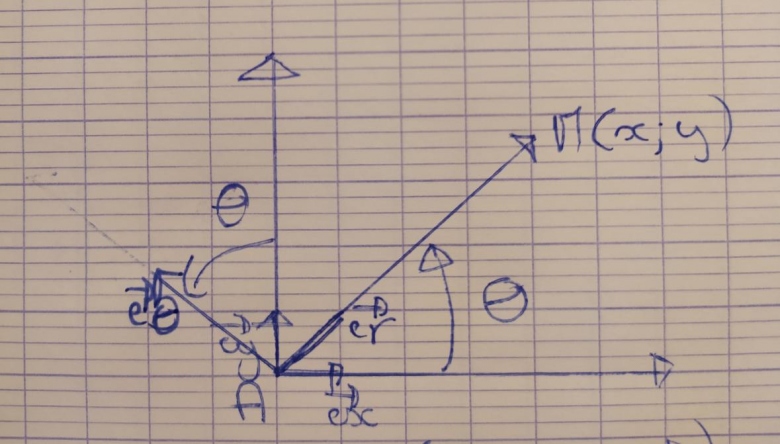
3. J'ai voulu commencé par les coordonnées polaires associées à R',
Repère polaire (A, er, e )
)
Avec er = AM/norme de AM
r = norme de AM
et l'angle entre ex et AM.
Mais je ne vois pas comment définir la trajectoire sous forme paramétrique. En fait c'est la vitesse angulaire qui me gêne : je ne sais pas comment "l'implanter" dans les formes paramétriques...
Les coordonnées polaires sont r=R et . La connaissance de r et de à chaque instant permet de caractériser simplement le mouvement. Puisque le mouvement est circulaire de centre A, r=constante = R. Pour caractériser complètement le mouvement, il faut en plus l'expression de =f(t) ; tu peux l'obtenir à partir de l'expression de la vitesse angulaire en tenant compte des conditions initiales.
Il aurait été intéressant de représenter sur la figure les vecteurs unitaires et
.
OK.
Pour la question 3 : tu as intérêt à raisonner d'abord en coordonnées polaires dans R', ce qui revient à trouver l'expression =f(t) à partir de la vitesse angulaire et des conditions initiales. Facile ensuite de revenir aux coordonnées cartésiennes dans R compte tenu des relations que tu viens d'écrire.
Ou alors c'est égal à la primitive de ω(t) ?
Oui. Comme une primitive est toujours définie à une constante près, tu trouves la constante à partir de l'état initial.
Je ne suis pas sûr d'avoir compris (j'ai peur d'avoir trouvé par hasard, je déteste ça..). C'est parce qu'on cherche à obtenir les positions ? Et ce qu'on c'est une vitesse ? C'est donc ça le lien ? Et cette primitive que je vais trouver ce sera pour x ? y ?
Selon l'énoncé :
Quelle est l'expression de ? Tu as étudié en math les primitives des fonctions trigonométriques...
À une constante près comme toute primitive.
L'énoncé précise :
=0 Si t=0.
Cela permet d'obtenir la constante.
OK pour l'expression de =f(t) ;
OK pour les coordonnées cartésiennes dans R' ;
restent les coordonnées cartésiennes dans R.
Du coup pour la vitesse dans R et R' je vais obtenir la même chose ?
Oui car R' est immobile par rapport à R.
Vitesse dans la base polaire : OK
Dans R et R', je pense qu'il faut expliciter les coordonnées du vecteur vitesse dans la base
Et pour la 6 je vois pas comment trouver en quel point et en quel instant l'accélération est la plus importante car je n'ai pas les valeurs de Ro,  et
et  o
o
Pour 6 : le résultat est simple s'il s'agit de l'accélération angulaire
Pour l'accélération, on ne peut répondre sans avoir de relation entre Ro, et o comme tu l'as écrit.
On peut répondre en revanche pour l'accélération tangentielle seule puis pour l'accélération normale seule.
Dans le cas particulier d'un mouvement circulaire, la base de Frenet se confond avec la base polaire (
Dans la mesure où l'énoncé ne demande pas de déterminer les composantes du vecteur accélération, il est possible (probable même mais pas certain...) que la question 6 concerne uniquement l'accélération tangentielle comme suggéré dans mon message du 20-09-20 à 14:19.

