Inscription / Connexion Nouveau Sujet
Torseurs d'un solide
Bonjour 
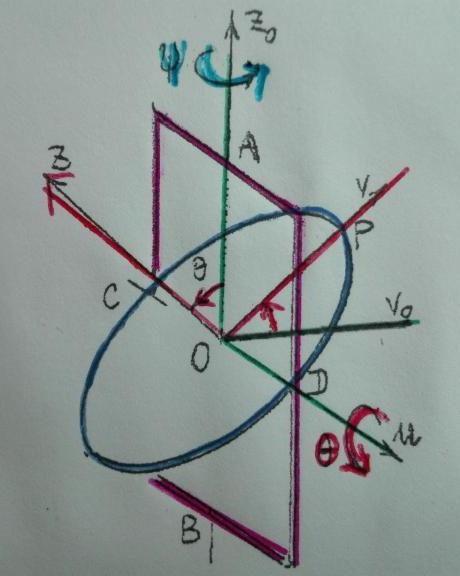
Nous avons un disque en rotation dans un cadre (lui même en rotation)
On souhaite déterminer les torseurs cinématiques, cinétiques, dynamiques (puis l'EC en faisant le produit des 2 torseurs) du cadre et du disque .
J'ai trouvé des résultats mais je doute qu'ils soient corrects
Pour le cadre je trouve
et
et pour le disque je trouve
et
Je doute du vecteur rotation du disque : est ce exact de prendre aussi en compte  (j'ai composé le vecteur rotation) ?
(j'ai composé le vecteur rotation) ?
Exprimer les torseurs au point O, avec est exact (et utilie pour calculer l'EC par la suite) ?
Merci d'avance pour votre aide
Bonne journée !
Bonjour
Tu ne pourrais pas poster un scan du schéma et un résumé de l'énoncé ? Sinon : difficile de t'aider...
super merci !
En calculer les matrices ,
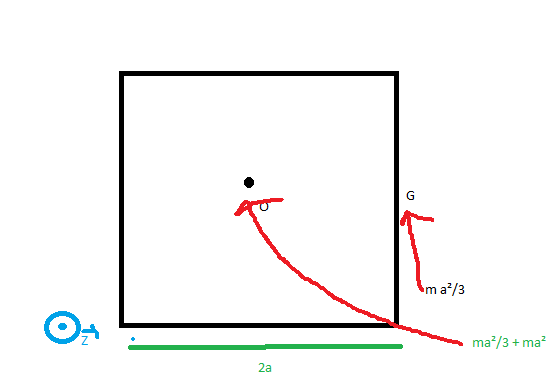
- Pour le cadre, (coté 2a masse m) seul le calcul de "C" est utile (le vecteur rotation du cadre est suivant z0 uniquement)
Je trouve 4* (m a²/3 + ma²) (en faisant pour une barre en G puis en transposant en O via Hugens et en multipliant le tout par 4)
-Pour le disque (rayon r, masse M) je trouve
Pour pouvoir multiplier cette dernière matrice par , je dois projette ce vecteur u suivant x,y et z, c'est ça ? Ou on peut multiplier directement sans que cela pose soucis ?
Merci encore et bonne soirée
Après réflexion la matrice d'inertie du disque est exprimée dans sa base, c'est à dire (u, v, z) (et pas u, v0, z0 comme je l'avais écrit avant)
Le problème serait donc la multiplication de cette matrice avec le du disque (pour le torseur cinétique) ?
Merci d'avance
Bonsoir
Je ne comprends pas bien les différents repères utilisés. Il me semble que par rapport à un repère terrestre fixe Ro, le cadre peut tourner autour de l'axe (Ozo) fixe. En même temps le disque peut tourner autour de son diamètre CD. Dans ce cas, le centre de gravité de chaque solide est fixe et confondu avec le point O ???
Comment sont définis exactement les deux repères liés à chacun des deux solides ?
Peux-tu scanner et poster un autre schéma plus complet ?
Bonsoir et merci pour votre réponse,
Il y a un premier référentiel (terrestre) fixe (x0, y0, z0) . (pas représnté sur la schéma)
Un deuxième référentiel (u,v0,z0) lié au cadre est créé, après sa rotation de autour de
Un troisième référentiel (u,v,z) lié au disque esr créé après sa rotation de suivant
Je peu essayer de faire moi même un schéma et le poster si vous souhaitez
Merci d'avance pour votre aide
PS : Après correction, j'ai trouvé, pour le C de la matrice du cadre en O,
C = C2barres horizontales + C2barres verticales = 2 * [(ma²/3) + a²m] + 2 [ 0 + a²m]
Et j'ai effectivement considéré que le centre de gravité du cadre et du disque sont confondus en O et fxes (d'où la vitesse VO nulle dans les torseurs )
Merci pour les précisions. Je pense avoir compris les notations maintenant.
Concernant C pour le cadre. Je ne vois pas vraiment l'intérêt de faire intervenir le théorème de Huygens.
Pour les côtés verticaux : la totalité de la masse se trouve à la distance a de l'axe. La définition du moment d'inertie par rapport à un axe conduit sans calcul à m.a2 pour chacun des deux côtés.
Pour les côtés horizontaux : l'axe Ozo passe par le centre de gravité de chaque côté. Que viendrait donc faire ici le théorème de Huygens ? Il s'agit du calcul ultra classique du moment d'inertie d'une tige homogène par rapport à un axe perpendiculaire à cette tige passant par son milieu. Cela donne m.a2/3 par tige. Sauf erreur :
Même si ce n'est pas directement utile pour la suite : A=C ; B=A+C.
OK pour la matrice d'inertie du disque homogène.
Merci beaucoup pour votre aide
- Pour la matrice du cadre, pour les cotés horizontaux, je pensais calculer le moment d'inertie de la barre en son centre de masse (ce qui donne a²/3 ) et transposer au point O via Huygens (et la distance entre Gz et Oz vaut 0, ) donc on retrouve bien votre résultat
(notre cours ne traite que des moments d'inertie par rapport à un point car apparemment c'est plus simple que par rapport à un axe)
J'avais commis de nombreuses erreurs (sur les bornes d'intégration j'avais 0 et 2a au lieu de -a et a) mais j'ai bien compris
- Cependant, pour le torseur cinématique du disque, comment multiplier la matrice obtenue par ?
La matrice de ce disque étant valable pour les axes (u,v,z) et pas z0 ...
Projette z0 sur z et v ?
Merci encore
Belle soirée !
La matrice de ce disque étant valable pour les axes (u,v,z) et pas z0 ...
Et oui : il faut exprimer le vecteur rotation instantané en fonction des vecteurs unitaires du repère dans lequel a été défini la matrice d'inertie. Cela donne le moment cinétique en O du solide par rapport au repère fixe Ro mais les composantes de ce vecteur sont explicités dans une base mobile. N'ayant pas l'énoncé complet, je ne sais pas si cela est accepté (c'est très souvent le cas) ou s'il faut ensuite remplacer chaque vecteur unitaire de la base mobile par son expression en fonction des vecteurs unitaires de la base fixe...
L'énoncé nous dit d'évaluer, en fonction des données (masses et dimensions des solides) et des paramètres de leur mouvements (angles et  )
)
1) Le torseur cinématique de chaque solide
2) Le torseur cinétique de chaque solide
3) Le torseur dynamique de chaque solide
4) L'énergie cinétique de chaque solide
Nous n'avons aucune indication concernant la base d'expression de tous ces torseurs ...
Cela donne donc, pour le moment cinétique du disque
En posant (sous réserve de vecteur normés)
C'est bien ca ?
Cela donne un vecteur exprimé dans la base mobile (u,v,z), et si on doit exprimer cela dans R0 = (x0 y0, et z0) , et rédériver pour avoir le moment dynamique, les calculs seront horribles, non ?
Merci pour votre aide
Bonne journée
les calculs seront horribles, non ?
C'est bien pour cela qu'il ne sont pas demandés en général !
Pour le calcul de l'EC, qui correspond à la moitié du produit du torseur cinématique et du torseur cinétique, cela pose soucis de multiplier (dans le cas di disque)
- Le vecteur rotation instantané (exprimé en base (x0,y0,z0)
avec
- Le vecteur moment cinétique (exprimé en base (u,v,z) )
?
Je trouve bizarre que nous n'ayons jamais eu besoin en cours de tout ramener à la base R0 et qu'il y ai besoin de le faire pour ce DM
Merci encore
Bonne journée 
C'est la même chose pour l'énergie cinétique. Il faut utiliser les vecteurs rotation instantanés traduisant les mouvement par rapport à Ro mais ces vecteurs doivent être exprimés dans la même base que la matrice d'inertie.
Donc pour le vecteur rotation du disque je trouve
Cela est-il correct ? (j'ai un doute sur la projection)
Pour la matrice exprimée en base (u,v,z) je pense la multiplier avec le vecteur rotation, en base (u,v,z) puis mettre le résultat obtenu en base R0 , cela est il exact ?
Merci encore pour votre aide précieuse
Bonne soirée
On ne s'est pas bien compris.
Pour le disque, puisque la matrice d'inertie est exprimer dans le repère (u,v0,z0), il faut commencer par expliciter le vecteur rotation instantanée du cadre dans ce même repère. Pas de problème bien sûr.
Pour le disque, c'est le même principe : puisque la matrice d'inertie est explicitée dans le repère (u,v,z), il faut aussi expliciter le vecteur rotation instantané du disque dans ce même repère.
Bonjour,
Cela donne donc, sij'ai bien compris, en base (u,v,z) ,
Pour la calcul de l'EC, où on fait le produit scalaire du vecteur rotation et du moment cinétique *0.5 (car ici VO = 0), on peut rester en base (u,v,z) sans que cela pose soucis (et avoir à juste exprimer z0 en fonction de v et z ) ?
Merci encore pour votre aide
Bon dimanche !
avec une erreur d'inversement de
Dans ces conditions : je suis d'accord !
Pour Ec, l'expression dans Ro sera la même quel que soit le repère utilisé pour exprimer le vecteur rotation par rapport à Ro et la matrice d'inertie à condition (je me répète) que le vecteur rotation soit exprimé dans le même repère que la matrice d'inertie.
Merci beaucoup Vanoise pour tous ces éclaircissements
Nous avons réussi (en faisant bien attention à ne pas "mélanger" les bases) à répondre aux questions du dm
L'expression du moment dynamique du disque est assez horrible (nous avons utilisé la formule de Bour) : cela mèneà la dérivée classique dans R2 + un produit vectoriel du style (..u + ..v + ..z) ^(...y + ...v + ...z) mais je ne vois pas d'autre moyen d'y arriver
Merci encore
bonne soirée

