Inscription / Connexion Nouveau Sujet
Tige homogène
Bonsoir,
Besoin d'un coup de main pour cet exercice:
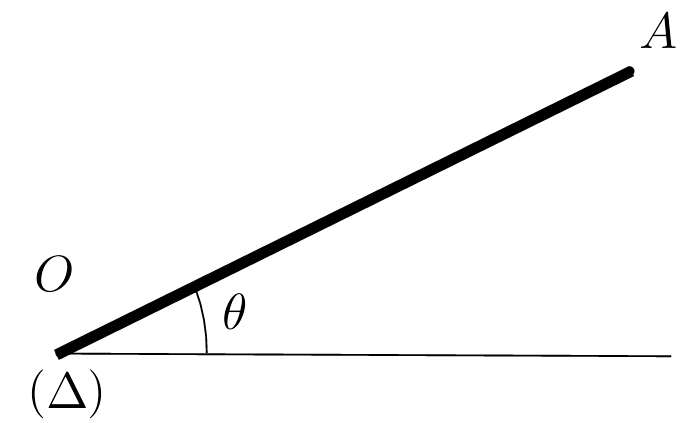
Une tige OA homogène de masse m de forme régulière de longueur L mobile autour d'un axe horizontal (Delta) passant par O fait un angle ∅ avec l'horizontale. À son extrémité A est fixé un godet de masse négligeable. Dans ce godet on dépose une bille ponctuelle.
1. Quel est le moment d'inertie de la tige par rapport à (Delta) ?
2. La tige est lâchée à partir de l'inclinaison ∅0 sans vitesse initiale.
2.1. En appliquant le théorème de l'énergie cinétique, trouver l'expression de la vitesse angulaire ∅' lorsque l'inclinaison vaut ∅.
2.2 Exprimer l'accélération normale du point A.
3. Par dérivation du carré de la vitesse angulaire trouver l'accélération angulaire ∅" de la tige puis l'accélération normale du point A.
4. Trouver la composante verticale de l'accélération az du point A. Quelle est la valeur initiale de az (lorsque ∅=∅0).
5. En déduire à quelle condition la bille quitte le godet dès le début du mouvement de la tige. (La bille suivant alors une trajectoire verticale). On prendra g=10m/s².
1)
D'après le théorème de Huygens, le moment d'inertie de la tige est:
J=(1/12)mL² + m(L/2)²=(⅓)mL².
2.1) Théorème de l'énergie cinétique :
<=> ½J∅'²-0=W(P)
Mais il me semble que que W(P)=0 car le poids est perpendiculaire au déplacement ...et le reste devient bizarre
Bonjour
D'accord pour le moment d'inertie puis l'application du théorème de l'énergie cinétique.
car le poids est perpendiculaire au déplacement
Pas systématiquement au cours de la rotation. Refait une figure en représentant la tige dans la position initiale et dans sa position finale. L'altitude de son centre de gravité aura diminué d'une hauteur h qu'il est facile d'exprimer en fonction de la longueur de la tige et des angles...
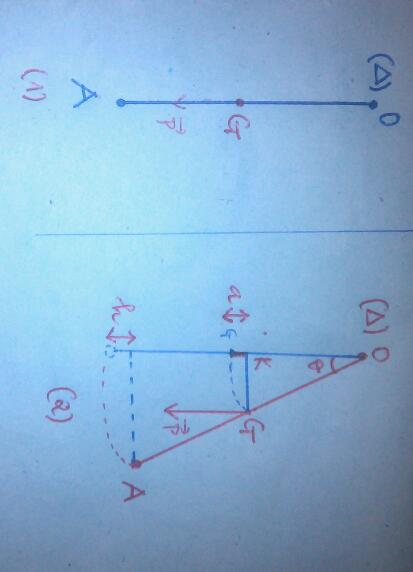
2-1) J'ai représenté en (1) la position initiale ∅_0 (que je n'ai pas spécifié ) et en (2) la position de la tige lorsque l'angle entre elle et l'horizontale est ∅.
L'énergie cinétique initiale est nulle et l'énergie cinétique en (2) est ½J∅'².
Le poids étant la seule force qui travaille :
½J∅'²=W(P)=mg*KG
; KG étant la diminution du centre d'inertie G de la tige.
Et j'ai trouvé KG=½L(1-cos∅).
Soit W(P)=½mgL(1-cos∅)=½J∅'²
J=⅓mL² Donc j'obtiens après arrangement :
∅'²=(3g/L)(1-cos∅)
Soit ∅'=√(3g(1-cos∅)/L).
2-2) L'accélération normale est a(n)=V²/L avec V=L∅' => a(n)=L∅'².
En remplaçant ∅'² par son expression, => a(n)=3g(1-cos∅).
3) *La dérivée du carré de la vitesse est : ∅"²=(3g/L)sin∅ .Donc l'accélération angulaire est ∅"=√[(3g/L)sin∅].
*Pour l'accélération normale du point A, je n'ai aucune idée ... Est-ce la même accélération demandée en 2.2) (?)
Selon l'énoncé, l'angle  est l'angle entre la tige et l'horizontale alors que sur ta figure, il s'agit de l'angle entre la tige et la verticale.
est l'angle entre la tige et l'horizontale alors que sur ta figure, il s'agit de l'angle entre la tige et la verticale.
La valeur initiale o n'est pas précisée. De toutes les façons, l'altitude initiale de G est supérieure à l'altitude de G à la position d'angle et la valeur h qui intervient dans l'expression du travail du poids est la différence d'altitude de G entre la position d'angle o et la position d'angle .
Bonjour,
Donc l'expression de la vitesse angulaire s'exprimera en fonction de l'angle ∅_0 et ∅ ? comme la variation de G est h-h_0 ..
Donc l'expression de la vitesse angulaire s'exprimera en fonction de l'angle ∅_0 et ∅ ?
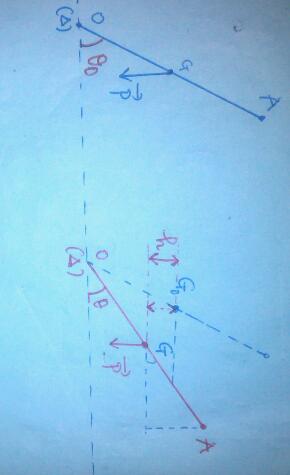
Oui. Il te faudrait refaire un schéma montrant la tige dans sa position initiale et la tige dans une position quelconque. Les deux angles devraient apparaître clairement sur ce schéma.
Tu as oublier de taper le "g" dans les dernières formules mais le raisonnement est correct. Merci de faire l'effort d'utiliser l'éditeur d'équations. C'est tellement plus lisible !
Ok je devrais avoir,
Soit
2.2) Accélération normale du point A.
avec
<=>
3. La Dérivée de la vitesse angulaire est:
Il s'agit effectivement de dériver par rapport à t et non par rapport à ; ainsi :
comme tu l'as écrit mais aussi :
Puisqu'il s'agit d'étudier un mouvement : , ce qui permet une simplification...
Ok je vois, on peut donc égaliser les deux expressions, simplifier ∅ comme vous l'avez dit et on a :
Inutile. Puisque le point A est animé d'un mouvement circulaire de centre O, l'accélération normale s'exprime simplement en fonction de L et du carré de la vitesse angulaire qui vient d'être étudié.
Je me demande s'il n'y a pas une faute de logique dans l'énoncé tel que tu l'as recopié. Logiquement, il s'agit à la question 3 de trouver l'accélération tangentielle en fonction de L et de l'accélération angulaire. Cette accélération tangentielle sera utile aux questions suivantes.
C'est ce que je me demandais aussi...
D'accord
puisque l'accélération angulaire et tangentielle de A (extrémité de la tige de longueur L ) sont liées par la relation ;
on a donc :
.
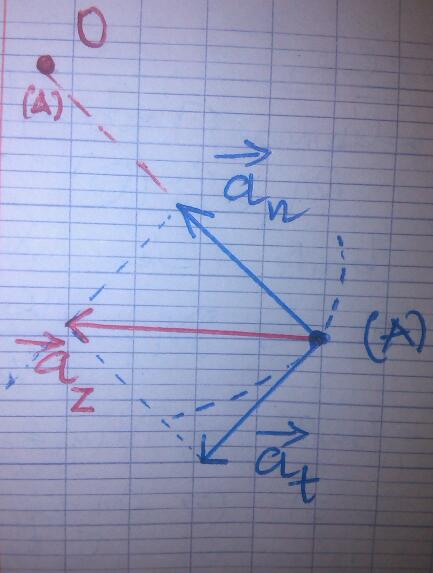
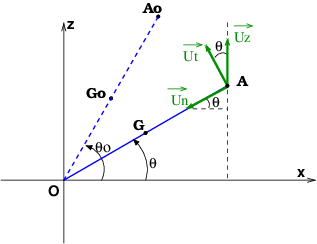
D'accord. N'oublie pas de préciser l'orientation de l'axe des z avant de calculer la composante verticale de l'accélération du point A.
voici comment je l'ai orienté (en image).
L'accélération az est :
En norme:
où x est l'angle entre l'accélération normale et tangentielle. x=π/2 rad
je reste avec
Tu viens de déterminer la norme du vecteur accélération, ce vecteur accélération étant la somme vectorielle de l'accélération normale et de l'accélération tangentielle.
Relis bien l'énoncé : il s'agit de déterminer la composante verticale az de ce vecteur accélération qui est la somme des composantes sur l'axe Oz de l'accélération normale et de l'accélération tangentielle :
az= anz + atz
J'oriente ainsi l'axe (Oz) suivant la direction de de l'accélération normale. Suivant cet axe, l'accélération tangentielle est nulle et le vecteur acceleration normal vaut -an=-3g(sin∅0 - sin∅).
Ainsi az=0- 3g(sin∅0 - sin∅)= 3g(sin∅0 - sin∅).
Pour ∅=∅0 => az=0
Non : relis bien l'énoncé ; l'axe (Oz) doit être vertical. Puisque l'angle est orienté vers le haut, tu as intérêt à orienter l'axe (Oz) suivant la verticale ascendante.
Hmm je confonds déjà des choses..
En projetant l'acceleration normale sur cet (Oz) , je trouve qu'elle vaut ancosθ . De même, je trouve que l'acceleration tangentielle suivant (Oz) vaut -atcosα . avec α=π/2 - θ.
En faisant de ces accelerations et en remplaçant at et an par leurs expressions, je trouve:
. Et lorsque θ=θ0 je reste avec az=-0,75gsin2θ
Tu pourrais commencer par faire une figure claire pour bien visualiser les projections. Je ne suis pas complètement d'accord avec ton calcul.
ok d'accord.
Lorsque ∅ est égale à ∅0 on a : sin∅=sin∅0
Ainsi sin∅-sin∅0=0
La valeur initiale de az est donc
=> .
5-condition pour que la bille quitte le godet dès le début du mouvement de la tige
Pour cela, je pense qu'il faut annuler l'accélération normale pour conserver l'accélération tangentielle. Cela me conduit à ∅=∅_0
La valeur initiale de az est donc
=>
Pour bien comprendre imagine une bille de masse mb posée sur un plateau horizontal. L'ensemble est animé d'un mouvement vertical descendant d'accélération
Tu peux aussi, pour mieux comprendre réaliser l'expérience très simple suivante. Ta main à plat, bras tendu, remplace le plateau et tu places dans ta main un objet peu fragile (petite balle, bille...). Déplace ta main verticalement vers le bas avec une faible accélération puis abaisse brutalement ta main vers le bas pour lui communiquer une forte accélération vers le bas... Observe...
Pour le cas de la bille sur le plateau, on peut appliquer le théorème du centre d'inertie en supposant que nous sommes dans un référentiel galiléen. La bille étant soumise à son poids et à la réaction du plateau.
On a donc : suivant le sens ascendant
-R+Pb=mba
<=> R=mb(g-a).
La bille reste collée au plateau si R existe. Dans le cas contraire, elle n'est plus en contact avec le plateau. Pour ce cas, R=0 => a=g.
Dans la deuxième expérience, je constate que l'objet se décolle de la main lorsque l'accélération de la main est grande et reste accolée pour une faible accélération.
Synthèse de ton calcul et des faits observés : la bille décolle pour :
a  g.
g.
Il te faut pour finir appliquer celà à ton problème.
Ok, la bille quitte le godet au début du mouvement (∅=∅_0) lorsque l'accélération initiale sur l'axe (Oz) est supérieure ou égale à g.
az≥g
suivant l'axe (Oz), le vecteur accélération g vaut -g
<=> -1,5gcos²(∅0)≥-g
g étant une constante positive non nulle :
<=> cos(∅0)≤0,82
=> ∅0≤35,26°≈0,62 rad.
Attention : cos(x)=cos(-x). Il faut plutôt écrire :
-35,26° o35,26°
o35,26°
Ce résultat est assez logique intuitivement : pour que l'accélération initiale soit importante (supérieure à "g " en norme), la position initiale de la tige ne doit pas être trop écartée de l'horizontale.

