Inscription / Connexion Nouveau Sujet
Résolution dun système de 3 équations non linéaires
Bonjour à tous,
Dans le cadre de mon tipe,
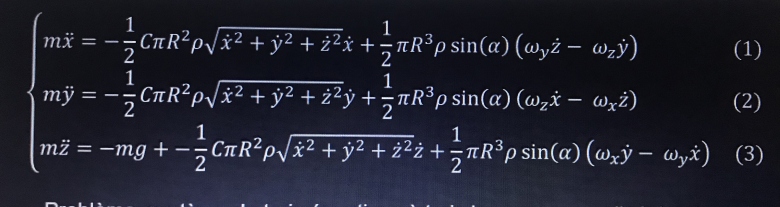
je dois résoudre le système d'équations que vous trouverez plus bas.
Où on a:
-x,y et z respectivement l'abscisse, l'ordonnée et la cote du vecteur positon de la balle
-ωx,ωy et ωz les composantes constantes du vecteur rotation selon les trois axes
-m: masse de la balle
-R: son rayon
-g l'intensité de la pesanteur
-CπR^2ρ/2 un coefficient constant
-πR^3ρsin(α)/2 un terme constant avec alpha constant
Ces équations n'étant pas linéaires , je ne sais pas les résoudre à la main et je me suis donc penché vers la méthode
de Runge-Kutta. J'ai les conditions initiales grâce à regressi, mais les dérivées premières des deux autres variables dans chaque équation me bloquent, Même si je fais l'hypothèse que v est de norme constante
Avez-vous une idée?
Ps: je ne savais pas où poster ce topic, c'est du domaine de la physique de deuxième année de prépa mais il semble y avoir beaucoup de maths/info derrière donc je m'excuse d'avance
Bonjour
C'est plutôt les racines carrées qui sont gênantes. Il n'est pas possible d'écrire ton système sous la forme :
où (M) serait une matrice (3x3) fixe.
La méthode de Runge Kutta risque d'être délicate à mettre en oeuvre. Pourquoi pas une méthode d'Euler améliorée (Euler implicite comme on dit aussi) avec un pas de calcul faible ? J'ai eu souvent l'occasion de comparer les deux méthodes : pour ce type de mouvement, les deux conduisent à des résultats concordants à condition de choisir un pas de calcul très faible pour la méthode d'Euler.
Voici un document qui explicite les deux méthodes :
![]()
Voici un autre document qui détaille la méthode d'Euler mise en oeuvre avec un simple tableur type Excel ou LibreOffice (paragraphes IV.1 et IV.2, pages 6 et suivantes ; le reste est totalement hors sujet) :
![]()
Bonjour Vanoise,
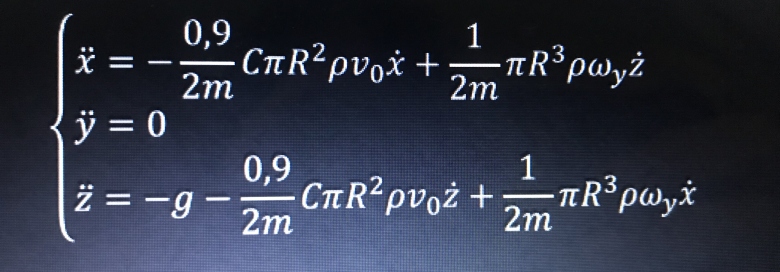
En fait j'ai finalement fait plusieurs approximations (v constant, ω porté par +-ey, alpha=pi/2, y. = 0 donc y..=0) et j'aboutis à ce système beaucoup plus simple qui se trouve plus bas.
J'essaye de résoudre le système avec python sans passer par euler mais en résolvant directement avec la fonction odeint et avec les conditions initiales:
v0x=38,97 m.s-1 et v0z=22,5 m.s-1,
mais quand j'importe matplotlib et pylab, j'ai des messages d'erreur.
Je crois que je vais essayer avec euler implicite même si je ne vois pas comment faire en python 
Merci beaucoup !
Si tu simplifies tes équations, tu tombes sur une situation simple comme décrite au début de mon message précédent. Je sais que des logiciels tels que Matlab ou Scilab proposent une résolution utilisant Runge Kutta. Je ne connais pas Python.
Le premier système d'équations sans simplifications se résout numériquement sans difficulté par méthode d'Euler.
À toi de choisir. Tu peux aussi en parler à tes professeurs...

