Inscription / Connexion Nouveau Sujet
Puissance virtuelle d'une liaison
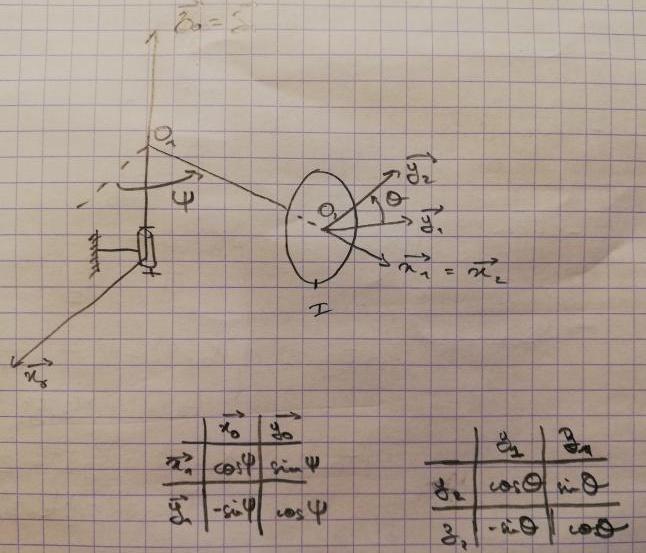
Bonjour, j'ai le problème suivant : il s'agit d'une roue (S2) en contact avec le sol, une tige (S1) de masse négligeable. La tige est entraînée en rotation par rapport au bati par le couple moteur en O.
La tige est relié au bati par une pivot d'axe et à la roue par une pivot
.
La tige est de longueur L.
Je souhaite déterminer la composante suivant de la pivot en
. J'utilise donc le CCV
avec
la distance entre
et
tel que
.
Cependant au moment de calculer les puissances virtuelles des liaisons, je me suis rappelé que mon professeur nous a dit d'utiliser le torseur des vitesses relative. Mais je ne comprend pas exactement ce que c'est.
Sur la correction mon professeur a effectué la différence entre la vitesse au point et celle au point
.
Est ce que c'est ce dont il voulait parler ?
Et qu'en est il des vitesses de rotation ? Est ce que je dois considérer la vitesse de rotation pour le calcul de cette puissance ?
Bonsoir
De façon générale, pour étudier la puissance des actions exercées par un solide 1 sur un solide 2, il faut raisonner à partir des vitesses du solide 2 par rapport au solide 1 et pas nécessairement les vitesse du solide 2 par rapport au sol...
D'accord, merci. Et pour ce qui est des vitesses de rotation ? Je doit utiliser lesquelles ? Dans la correction la puissance virtuelle de la liaison est calculée avec une vitesse de rotation nulle. Mais je ne suis pas certain de comprendre pourquoi

