Inscription / Connexion Nouveau Sujet
Problème de Mécanique
Bonsoir, j'ai voulu faire un exercice de mécanique d'un livre et... j'ai énormément de mal à repondre dès les premières questions =(... J'espère que vous pourrez m'aidez s'il vous plaît, je tiens vraiment à le réussir pour m'entrainer pour mon prochain DS de physique.
Voici l'énoncé:
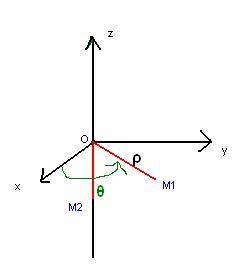
On considère le referentiel galileen terrestre et un repère .
On note ,
et
respectivement les vecteurs unitaires des axes
,
et
.
Un système matériel, composé de deux masses ponctuelles et
reliées par un fil souple, inextensible, de longueur
et de masse négligeable, est soumis aux liaisons suivantes:
, de masse
, est astreint à se déplacer sans frottement dans le plan Oxy;
, de masse
, est astreint à se déplacer sans frottement sur l'axe Oz (sa cote z est négative).
Le fil souple passe par l'origine O où le plan est percé d'un trou et ses contacts avec Oxy et Oz sont réalisés sans frottement.
La position de M1 est définie soit par ses coordonnées cartésiennes x et y dans le plan Oxy, soit par ses coordonnées polaires et
. Dans ce dernier cas, on notera respectivement
et
les vecteurs unitaires déduits de
et
par rotation d'angle
autour de
La position de M2 sera définie par sa cote .
On note la force exercée par le fil sur
.
et
sont respectivement les résultantes des forces de liaison exercées par le repère Oxyz sur
et
A t=0, ,
,
,
,
valent
,
,
,
,
.
et leur dérivés ,
,
,
,
valent
,
,
,
,
.
(Désolé pour la notation "point". Le "(point)" signifie qu'il y a un" point au dessus de la lettre", ca représente sa dérivée.)
Questions
a) Que peut-on dire de et
du fait du non-frottement?
b) Quelle est la relation existante entre les paramètres de position de et
lorsque le fil est tendu?
c)Déterminer l'expression de l'accélération de .
d)On suppose que le fil reste tendu dans un intervalle de temps t [a,b]. Déterminer la relation liant
et
dans cet intervalle.
Maintenant on étudie le mouvement du système lorsque est lancée à l'instant initial avec une valeur nulle pour
et
avec une valeur nulle pour
.
Pour les question a),b),c) et d), on suppose que le fil reste tendu pour t 0
e) quel valeur faut-il donnée à pour qu'il en soit ainsi?
f)Appliquer le PFD à M1 puis à M2
___________________________________________________________________
Il y a encore 8 autres questions, mais je prefere en poster les 6 premières.
Pour la a) j'ai marqué que comme il n'y avait pas de frottement, donc la somme des forces appliqués sur M1 et M2 doit être nulle donc +
= 0 d'où
= -
Est-ce bon mon raisonnement?
Pour la b)... j'ai vraiment aucune idée ... Pouvez vous me donnée des indices?
Pour la c) j'ai réussi à la faire ! mais je ne tape pas la reponse parce que ca fait intervenir des dérivées secondes et je ne sais pas comment ecrire des dérivées seconde en LaTex...
Pour la d) comme pour la b)... je ne sais pas du tout comment faire...
Et pour la e) et la f)... pouvez vous me donner des indices?
Merci d'avance.
Coriolis 01
a) pour les efforts de liaison, considère les directions dans lesquelles chacune des masses peut se mouvoir librement : en l'absence de frottements, ce sont des directions selon lesquelles les composantes de et
sont nulles. Tu peux don en déduire la direction de ces deux vecteurs.
b) Ne peux-tu pas exprimer la longueur du fil en fonction de la position de et de
lorsqu'il est tendu?
Merci donaldos de m'aider.
a) Enfait je ne comprend pas trop ce que veut dire "force de liaison"... je considère que est la somme des forces s'exerçant sur M1 donc
et la somme des forces s'exerçant sur M2, donc
avec
la tension du fil exercée sur M2 suivant l'axe Oz
et je reste bloqué sur ca... est-ce-que j'ai bon jusque là?
b)J'ai et
et je reste bloqué =(.
Je n'arrive pas à mettre en lien M1 et M2...
en ce qui concerne la d), pouvez me dire comment commencer s'il vous plaît?
Merci d'avance.
Coriolis01
a) Il s'agit juste des forces qu'exerce le "repère" sur les masses de façon à restreindre leur liberté de mouvement. Pour il s'agit de la contraindre à rester dans un plan : l'effort de liaison ne peut donc qu'être orthogonal au plan (de façon à s'opposer aux mouvements interdits sans s'opposer aux mouvements dans le plan). Pour
, il s'agit de la contraindre à rester sur un axe : les efforts potentiels sont orthogonaux à cet axe...
b) Tu n'es pas bloqué puisque tu as établi que (attention au signe), or tu sais que l'on a aussi :
...
Pour d), ayant établi un lien entre et
, il ne te reste qu'à l'introduire dans l'expression de l'accélération.
a)Ah j'ai compris(enfin je crois!). Il fallait juste dire que s'exprime en fonction de
(par exemple
) pour dire que
est orthogonal à
afin que
"reste" dans le plan Oxy.
Et s'exprime en fonction de
et
afin que
"reste" sur l'axe Oz .
Est-ce-que c'est bien ça qu'il fallait repondre?
b) Merci pour le signe!
mais je reste quand même bloqué: J'ai donc et
= M1 donc
= (z+L)
je trouve une relation entre L, et z mais pas entre M1 et M2...
d) Je n'ai pas très bien compris, vous voulez dire une relation entreet
? Dans l'expression de l'accélération enfait je trouve la même expression de l'accélération en coordonnées cylindriques. Mon accélération s'exprime en fonction de
et
, de la dérivée de
et
et de la dérivée seconde de
et
. Est-ce bon?
Merci d'avance.
Coriolis01
Pour a), c'est l'idée : un effort ne peut exister que dans les directions ou la liaison en question "bloque" l'élément mobile.
b) on te demande une relation entre les paramètres de position, ce que tu as...
Pour c) le résultat attendu est vraisemblamblement
Pour d), ce qu'on te demande n'est peut-être pas ce que je pensais : d'après l'expression trouvée en b) on devrait déduire directement . Ton exercice à l'air très dirigé, on attend peut-être des réponses très courtes.
Par ailleurs, pour la suite un bilan des forces va donner :
que tu vas sûrement devoir combiner pour déterminer le mouvement de M1 dans la suite de l'exercice.
Pour c) oui j'ai bien cette expression.
Pour d) on a bien donc
, pourquoi vous avez marqué
?
Dans cette question, on énonce que " on suppose que le fil reste tendu dans l'intervalle de temps t[a,b]" Il n'y a pas besoin d'utiliser l'expression de l'accélération de M1 (question c) ) pour trouver la relation entre
et
?
Pour f) En projetant je n'ai pas la même chose que vous, j'ai :
en projetant sur :
(
-
) = -
en projetant sur : on a rien
en projetant sur : 0 = -
g
Je trouve bizard ma projection sur ...
Et pour appliquer le PF2 sur M2 il faut que je détermine aussi l'expression de l'accélération de M2?
Pouvez-vous me dire comment vous avez trouvé vos projections s'il vous plaît? Vu qu'on obtient pas la même chose...
Pour e) vous pouvez me donner un indice s'il vous plaît?
Merci d'avance.
Coriolis01
Hmmm, je susi de moins en moins attentif : j'ai inversé et
.
L'accélération de ne peut être que verticale, d'où l'apparition de
.
Quant à l'accélération verticale de , elle est a priori nulle (poids compensé par l'effort de liaison vertical)
Poue e), je dirais simplement que puisque l'autre masse est initialement immobile, un mouvement de
dans le sens contraire induirait nécessaire un raccourcissement
et le fil se détendrait donc tant que
n'aurait pas atteint une vitesse identique à celle de
. Mais il est possible que quelque chose d'autre m'échappe...
Pour f) Oui maintenant je comprends d'où viens le , merci.
mais j'aurais une autre question concernant les forces appliquées sur M1 et M2:
Pour M1: on a considérée pour les forces agissantes sur M1: Le poids et la tension du fil, mais est-ce-que il y a aussi la résultante des forces de liaison exercées par le repère Oxyz sur M1 ?
et pour M2, n'y-a-t-il pas qui s'appliquent sur M2?
ou je me trompe?
Pour , comme je l'indique dans le message précédent,
s'oppose au poids et compense l'effet de celui-ci.
Concernant , cette force s'opposera à toute force tendant à écarter
de l'axe Oz: ici, les seules forces s'appliquant à cette masse sont son poids et la tension du fil, toutes deux verticales...
Au final, on ne s'intéresse qu'aux forces qui agissent dans une direction où le mouvement des masses est autorisé et ont donc une réelle influence sur l'accélération de celles-ci.
Au niveau de l'énoncé, il y a juste une petite erreur (sans aucune importance pour les question a),b),c) et d) ):
J'ai marqué "Pour les question a),b),c) et d), on suppose que le fil reste tendu pour t 0 ", et je me suis trompé, c'est plutôt >> "Pour les questions e),f),g) et h) on suppose que le fil reste tendu pour t
0 "
J'écris a suite de l'énoncé :
Maintenant on étudie le mouvement du système lorsque M1 est lancée à l'instant initial avec une valeur nulle pour \theta_0(point) et M2 avec une valeur nulle pour z_0(point).
e) Quelle valeur faut-il donnée à pour qu'il en soit ainsi ?
f) Appliquer le PFD à M1 et à M2.
g) En déduire les équations du mouvement de M1 et M2 en fonction de ,
et de leur dérivées par rapport au temps.
h)
- Montrer qu'il existe une solution des équations telles que, quel que soit t positif ou nul,
- Quelle est alors la trajectoire de M1? Déterminer la loi de son mouvement.
- Calculer . Le fil peut-il se détendre au cours du mouvement?
- Jusqu'à quel instant le mouvement décrit précédemment est-il valable?
____________________
Pour e), je ne comprend pas pourquoi vous dite qu'il faut que , il ne faut pas donner une valeur à
?
Pour g) dois-je etre en coordonnées cartésiennes ou cylindriques?
j'ai essayé en cylindriques pour M1 mais je n'aboutit pas à une équation...
Pour f)
Ok j'ai compris pour les forces qui s'appliquent sur M1: Il n'y a que la tension du fil étant donnée que le poids et s'annulent entre eux
et j'obtiens :, est-ce bon? Si oui, à partir de cette équation j'ai tenté de trouvé l'équation du mouvement(question g) ) mais je n'ai pas réussi...
Pour M2 : il y a donc 3 forces qui s'appliquent sur M2 La tension du fil, le poids, et ? ai-je bon?
Si oui en Appliquant le PFD j'obtiens:
Et je n'ai pas réussi à trouver les equations du mouvement à partir de cette équation...
Pouvez vous me donner des indices s'il vous plaît?
Merci d'avance.
Coriolis01
Il y a des choses qui nécessitent une petite correction:
-l'expression de l'accélération de ?
-l'application du PFD pour s'obtient en projetant l'accélération sur l'axe Oz uniquement. Or tu as déterminé depuis le début de l'exercice quelque chose d'important concernant
...
Pour la suite, utilise le fait que le fil est tendu et que la tension est constante d'une extrémité à l'autre du fil.
Je pense que l'expression de l'accélératio de M1 est exacte.
j'ai juste enlevé le terme vu que
est constant pour les question e),f),g) et h)...
En ce qui concerne l'application du PFD sur M2... Pouvez-vous m'éclairez un peu plus s'il vous plaît? J'ai vraiment du mal à comprendre comment est représenté... =( Je sais juste que ce vecteur est orthogonal à
et puis ensuite je ne sais pas comment faire pour appliquer le PFD...
Pourquoi penses-tu que est constant?
En ce qui concerne son accélération vaut:
Or la liaison contraint à rester sur l'axe Oz, d'où:
On ne s'intéresse donc qu'à la composante selon .
est orthogonal à ce vecteur, il n'apparaît donc pas dans l'application du PFD projeté sur
.
Je suis tout à fait d'accord avec vos résultats! =)
Pour avoir les équations du mouvement il suffit juste de projeter?
Si oui j'ai cela:
Pour M1:
Pour M2:
(En accord avec ce que vous avez marqué dans votre dernier message =) )
Et maintenant j'ai une question :
Est-ce-que (c'est-à-dire que la tension du fil appliquée à M1 et M2 sont identique) ?
Si oui on a donc pour M2 :
Pour les reponses suivante j'ai :
étant donnée que donc
constante
La trajectoire est rectiligne. ai-je bon?
Et là je ne sais pas du tout comment trouver la loi de son mouvement... Pouvez-vous me donner un indice s'il vous plaît?
Merci d'avance.
Coriolis01

