Inscription / Connexion Nouveau Sujet
pendule simple
salut les amis.
j'ai un problème que j'ai besoin un aide pour le corriger
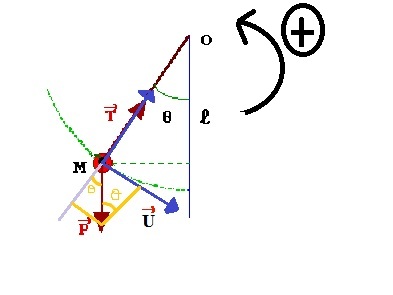
on a un pendule simple écarté vers la gauche est libérer sans vitesse initiale
:
l'équation différentielle:
le point matériel M soumis à
la tension de fil
le poids
relation fondamentale de dynamique
projection sur
pour est nul
pour ]
il est positive ce qui normale car il est une force motrice
on trouve
ce qui nous donne
or on sait que l'équation de pendule simple est :
ou je trompe
Bonjour,
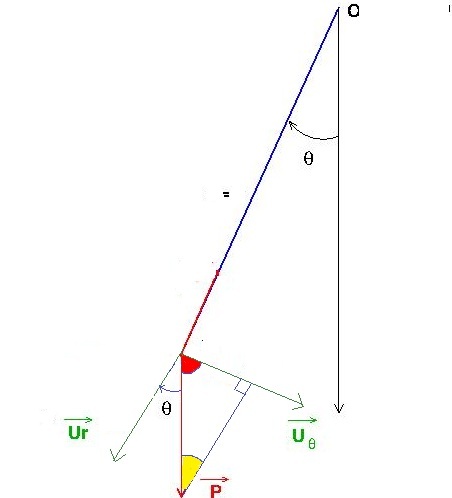
Sur votre dessin, θ<0 et donc la projection de P est -mg sin θ.
Pour avoir des dessins simples d'un point de vue trigonométrique, il faut que les angles soient positifs et de l'ordre de 30° ou 60°.
Pour votre deuxième vecteur bleu, si c'est , il est à l'envers.
bonsoir;
merci pour votre réponse.
pour :
"Pour votre deuxième vecteur bleu, si c'est \vec{u_r}, il est à l'envers."
pourquoi?
est au sens de mouvement. le point matériel descendre vers le bas. donc je pense que
est au bon sens
oui exactement est négatif
mais je ne comprend pas pourquoi la projection de P(on le nomme ) est -mg sin θ.
on a dans le dessin:
merci pour votre suivi
Cela veut dire quoi ?
Pour moi
Dans le dessin, on a
Remarque : l'indice r pour une projection orthoradiale ne peut que conduire à des confusions.
Merci pour votre réponse
Oui exactement pour U_r
Pour
}
Logiquement c'est vrai.
Mais comment trouver ça mathématiquement.
Pour la citation:
L'indice r pour une projection orthoradiale
Je ne comprend pas cette phrase.
Merci
Si je ne sait pas d'abord l'équation de pendule simple ( est c'est ça qui est arriver dans la 1er fois) je ne peut exécuter une relation entre les grandeurs en basant sur la remarque.
Il faut des relation mathématique bien précis .
Mais comment trouver ça mathématiquement.
Il faudrait poser la question sur le forum math, en physique dans ce genre de cas, on cherche d'abord les relations en valeur absolue, puis on affecte le signe. Pour éviter ce genre de difficultés, on fait un dessin avec des angles positifs ...
"L'indice r pour une projection orthoradiale" : vous notez Pr la composante orthoradiale (selon
exactement.
merci pour la reponse
je veut seulment savoir comment justifier la préseance de signe - dans un examen ou concours si ils ont poser les angles négatifs
je pose les derniers question :
1- l'angle entre et
combien? (les angles jaune et rouge dans le dessin)
ou
ou un autre valeur
2- est positif (dr>0)la vitesse
positif et s'acroitre pendans le demi periede entre la position intial et la postion d'équilibre
mais pour (
?)je ne sais pas s'il positif ou négatif
accroître ou décroître et par suite si valable dans ce cas
Sur votre dessin, on voit (θ du bas) que θ=
L'angle rouge, aux signes près, est complémentaire de θ :
avec -π/2<θ<0 et l'angle entre vecteurs positif soit
Si c'est un pendule "normal" : la longueur du fil est constante.
découle directement de la définition, et est algébrique, donc correcte dans tous les cas.
Ici donc
Par raisonnement sur le dessin, en valeur absolue θ diminue mais comme il est négatif, on a bien .
De nouveau, pour éviter de jongler avec les signes, faire un dessin avec des angles positifs.
bonsoir
pour c'est exacte
moi je désigne s : l'abscisse curviligne
donc si soit
la projection de sur
et le produit scalaire de deux vecteur qui égale
en utilisant la définition de produit scalaire de deux vecteurs et les transformation trigonométrique
n'est ce pas ?
Merci beaucoup.
encore une petite difficulté;
si on prend les angle positif
la projection de sous
est
d'ou vient le signe -
est ce que
L'accélération orthoradiale vaut toujours .
L'erreur est dans le dessin est dans l'autre sens, d'après sa définition.
Quelle est, pour vous, la définition de ?
Salut, je fais une confusion entre les repaire: un repère de coordonné polaire et un repère de Fresnel.
Le vecteur des abscisse dérigé vers le sens de mouvement
Réponse à quoi ?
J'ai répondu à la question de signe et vous m'avez répondu que votre signe était du au fait que vous aviez confondu repère de Frenet et repère polaire.
Bonsoir;
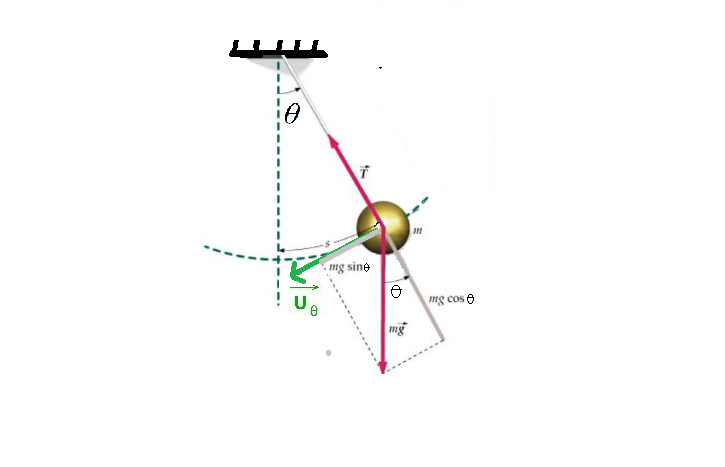
j'ai pas encore comprendre d'ou vient le signe - dans le cas ou les angles sont positif dans le cas ou le mouvement descendant, on utilise un repère de Frenet
l'axe tangentielle se dirige vers le sens de mouvement
donc la progection de est postif vaut
il ne reste que est ce que
L'accélération vaut
est vrai dans la forme vecorielle
mais dans la forme scalaire je ne sais pas quel est la régle
merci de votre patience
Avec votre repère de Frenet, orienté dans le sens non trigo, l'abscisse curviligne sur la trajectoire est -Rθ, et donc la vitesse vaut *, et l'accélération tangentielle vaut
. La projection du poids valant mg sinθ, on obtient bien la même équation :
* Cohérent avec votre représentation, le sens du mouvement est descendant, le repère de Frenet aussi donc v>0, et comme , cela donne bien
.
Merci beaucoup.
C'est ce que je cherche.
Maintenant je comprend bien.
Une dernière suppléance
Dans le cas des angles négatif
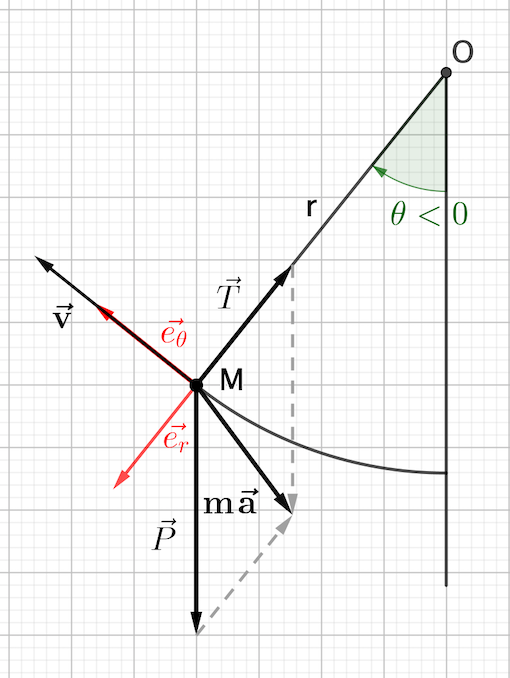
Je veux une représentation graphique de :
et
et v et
et a
S'il est possible
Merci beaucoup
Que voulez-vous dire par là ?
On peut représenter géométriquement θ, mais , donc cela dépend de la fonction θ(t), donc on peut en faire une représentation graphique
mais pas géométrique. De même pour
.
Pour la vitesse, je vais voir. Pour l'accélération d'après , si vous tracez la résultante des forces, vous avez a.
Je ne suis pas sûr que cela réponde à votre question...
Bonjour,
Merci beaucoup pour votre aide.
La représentation géométrique éclaircir beaucoup de chose. Merci
Mais je la représentation graphique des grandeurs mentionné en fonction de temps( sous forme sinusoïdal). S'il est possible bien sur.
J' ai réfléchi bien dans ton message qui explique le signe -
Je ne comprend pas pourquoi v>0
Il est vrai au meme sens que la composante tangentielle de repère de frenet mais il est au sens anti-trigo
Merci
Je ne comprend pas pourquoi v>0
Cela résulte de votre définition : "l'axe tangentiel se dirige vers le sens de mouvement" donc
mais il est au sens anti-trigo
cela a pour conséquence
Bonsoir;
merci pour votre réponse
donc si je comprend bien
le repère quand fait pour les angles est totalement indépendant pour le repère quant fait pour le mouvement de translation soit un repère de Frenet ou un autre repère
et on a :
si les deux repère en le même sens
si les repère en de sens contraire
Bonjour,
C'est ça ce que je veux comprendre. Et c'est pour ça que j'ai besoin la représentation graphique de et
et
d'une part
Et s et v et a d'autre part
Pour il est parfois positif et parfois négatif c'est clair donc se varié entre
et
La même règle pour et
Mais pour s je constate qu'il est toujours positif , il est en croissance
V est toujours en sens positif de
Donc v toujours positif
C'est ça ce que je résonne, mais je ne sais pas s'il est vrai
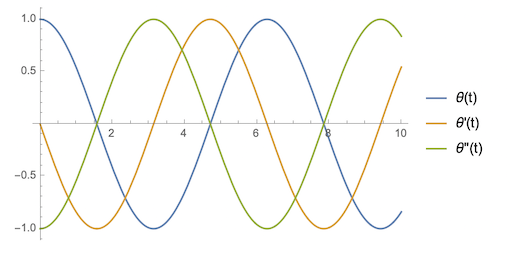
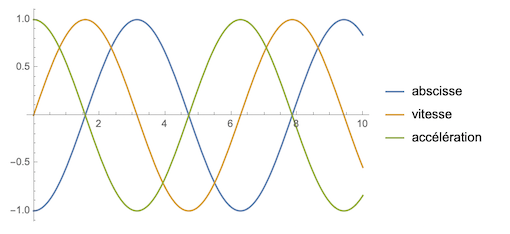
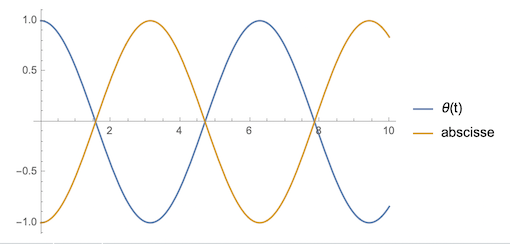
Pour la représentation graphique (ne pas tenir compte des graduations des ordonnées, ce sont des grandeurs réduites dans le cadre des petits mouvements : ordonnée=θ/θ0 avec θ0 l'angle initial ):
Premier graphe en polaire
Deuxième graphe en Frenet (origine de s en bas de la trajectoire s=0 pour θ=0, vous voudriez plutôt origine de s au début du mouvement ?)
Troisième graphe θ et s
Ceci étant avec votre choix de Frenet (donc ), vous avez s=-rθ (ou s=r(θ0-θ) pour correspondre davantage à votre point de vue ?), v=-rθ', a=-rθ".
Mais pour s je constate qu'il est toujours positif , il est en croissance
C'est là à mon avis où réside le problème ; d'où cela vient-il ?
V est toujours en sens positif de
Idem
Vous choisissez un repère de Frenet tel que, lorsqu'on lâche le pendule avec θ>0,
Bonsoir
Merci beaucoup pour votre efforts et votre patience
Je vais analyser les courbe attentivement
Maintenant pour notre discussion :
. Citation :
Mais pour s je constate qu'il est toujours positif , il est en croissance
C'est là à mon avis où réside le problème ; d'où cela vient-il ?
Citation :
V est toujours en sens positif de \vec{T}. Donc v toujours positif
Idem
Tu as montrer dans votre message :
16-03-25. 18:30
. Posté par gts2 16-03-25 à 08:30
Citation :
Je ne comprend pas pourquoi v>0
Cela résulte de votre définition : "l'axe tangentiel se dirige vers le sens de mouvement" donc
J'estime que le même raisonnement reste valable pour les autre cas
On tenant compte le repère de frenet qui a toujours le sens de mouvement et par suite v et s sont toujours au sens de T
Au contraire d'un repère fixe qui lorsque le mouvement change la direction, les grandeurs change le signe comme un oscillateur harmonique
Vous choisissez un repère de Frenet tel que, lorsqu'on lâche le pendule avec θ>0, \vec{T} soit dans le sens de la vitesse au début du mouvement. Pourquoi pas ? Mais une fois le repère choisi, vous ne pouvez pas en changer en cours de route
Est ce que le repère de frenet ne change pas de direction lorsque le mouvement change sa direction?
Dans les graphe le sens de s est opposé au sens de
Pourquoi?
On a déja confirmer dans un message précédent que le repère de s est indépendant de sens positive des angles
Ici quel est le repère utiliser pour s
Merci
Sur une courbe, il y a UNE abscisse curviligne, c'est "la distance OM mesurée sur la courbe, O étant l'origine et M le point courant, le tout algébriquement donc avec une convention de signe" (avec des guillemets, parce qu'énoncé avec les mains).
Ici si vous prenez l'origine au point de départ à droite (θ=θ0) et avec l'orientation "en descendant", s=r(θ0-θ).
Donc au départ s augmente, atteint un maximum puis diminue.
Le repère de Frenet est un repère associé à cette abscisse curviligne et dépend donc de la convention de signe choisi.
"Dans les graphe le sens de s est opposé au sens de θ", à cause de la définition initiale du repère de Frenet qui définit la convention de signe sur s.
Le repère utilisé ici est le repère de Frenet que vous ne pouvez pas changer en cours de route : si le repère au point M de la trajectoire dépendait du sens de parcours, il faudrait écrire pour chaque point deux équations et les raccorder ensuite.
Donc, non : "le repère de Frenet n'a pas toujours le sens de mouvement".
Le raisonnement de départ a pour but d'associer la convention de signe sur s et v et l'orientation de . Donc ici, il a été fait le choix d'orienter
dans le sens de la descente, ce qui signifie qu'en terme de signe quand le pendule descend v>0 et quand il monte v<0.
Merci beaucoup,
C'est un peu clair maintenant,
Juste une petite difficulté.
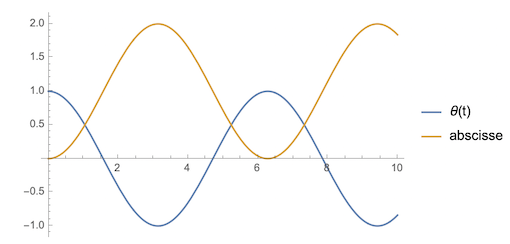
. Ici si vous prenez l'origine au point de départ à droite θ=θ0 et avec l'orientation "en descendant", s=r(θ0-θ)
Si en prend en compte cette condition initiale.
Le graphe de s doit se commence de 0 augmente jusqu'à maximum lorsque
N'est ce pas
C'est bien cela : j'ai refait uniquement le dernier graphe :
Remarque : j'ai bien mis un nouveau graphe ; dans la fenêtre d'édition c'est bien le bon graphe, dans la fenêtre aperçu c'est un des graphes précédents.
Bonsoir.
Merci beaucoup.
C'est clair et logique maintenant.
Dans un livre :
"Travaux dirigés de physique"
Il ont fait:
Je ne comprend pas cette formule ?
Moi non plus !
Pour le début, , on peut éventuellement comprendre qu'il y a un trajet uniquement dans un sens et qu'on a pris le vecteur tangent de Frenet dans ce sens.
Mais pour la deuxième partie, ce n'est pas homogène donc on s'arrête là (une vitesse égale à une accélération).
Vous-êtes sûr qu'il n'y a pas de faute de frappe (type deux équations au lieu d'une : et
) ?
Dans ce cas c'est correct sous la condition "trajet uniquement dans un sens et vecteur tangent de Frenet dans ce sens." C'est simplement l'accélération tangentielle de Frenet "compliquée" par des valeurs absolues.
Pour ce qui est de , il "suffit" de prendre la bonne orientation pour θ. Et cela sous-entend r=constante, pour que la tangente coincide avec
.
Pour être plus précis, il faudrait le contexte exact.
Bonsoir;
le livre est très reconnu :
Travaux dirigés de physique
1ère année d'enseignement supérieur
Michel Denizart, Raymond Jagut, Gabriel Soum
je ne sais pas si la loi de forum permet de scanner la partie qui traite ce sujet
ce que je ne prend pas
ce que je sais si je ne trompe pas est que
dans n'importe quel repère
en plus si on prend en compte seulement le repère de Frenet
- la vitesse est toujours positif parce que il dépend au sens de mouvement
-l'accélération peut être positif ou négatif selon que le mouvement est retardé ou accéléré
Si vous considérez que "la vitesse est toujours positive" alors et
sont identiques.
Une citation courte doit pouvoir se faire, sinon la page (une partie est accessible en ligne).
Bonsoir;
l'ennoncé est :
un petit cube M de masse m glisse sans frottement dans une cuvette de centre I de rayon R
soit l'angle que fait IM avec la verticale
le point le plus bas de la cuvette B, situé situé à une distance h de sol.
dans le référentielle de laboratoire R(O,x,y,z) supposé galiléen, dont l'origine O se trouve au niveau de sol.
l'accélération de pesanteur est
déterminer l'équation différentielle de mouvement de M pour les faible élongation angulaire
réponse :
l'instant t ou la phénomène est étudiée pouvant être quelconque.
examinons les quatre possibilités représentés sur les figures ci dessous
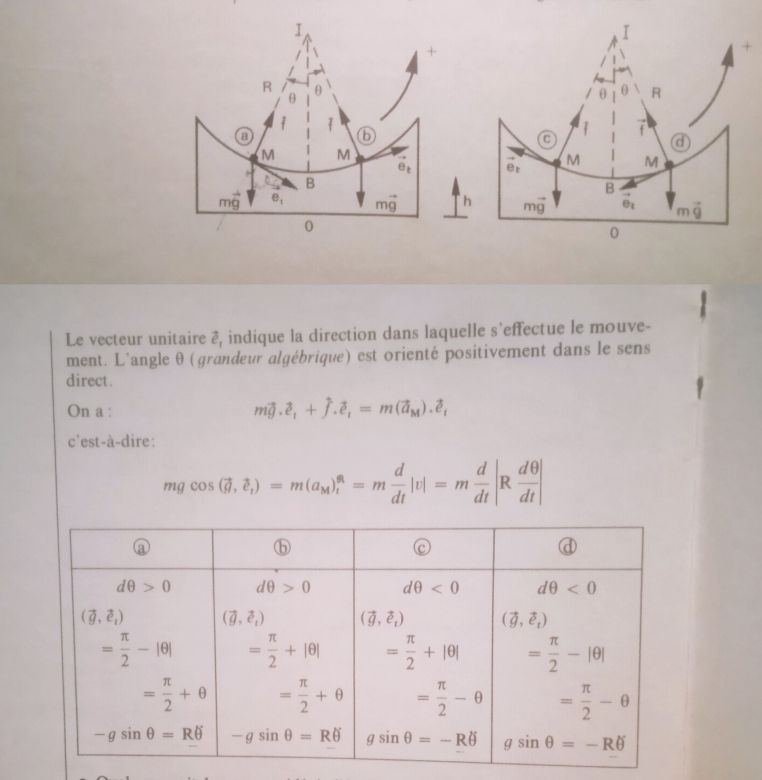
Je ne sais pas de quand date ce texte, mais il date d'un moment où l'on ne manipulait pas les grandeurs algébriques (bien qu'il dise que θ est une grandeur algébrique).
Ce qui conduit à écrire quatre équations au lieu d'une.
L'algébrisation consiste à définir précisément de quoi on parle (il est d'ailleurs obligé lui aussi de le faire), à écrire dans un état clairement défini (je me répète) une équation qui, étant algébrique, est alors valable dans tous les cas.
On se place dans un cas simple angle positif, dérivée positive pour éviter des erreurs (cas b), on établit l'équation et c'est fini.
On peut faire plus rapide en oubliant Frenet et en utilisant les "automatismes" liés aux coordonnées polaires (mais il se peut que cela ne soit pas encore automatique, et dans ce cas, c'est un moyen de créer/renforcer de tels automatismes du type .)
Autrement dit, il n'y a pas d'erreur dans ce texte, mais ce texte est peu adapté à aujourd'hui où l'on raisonne quasi systématiquement de manière algébrique.
Bonsoir;
Merci pour votre réponse
Ce qui conduit à écrire quatre équations au lieu d'une.
c'est pas exactement le cas
il veut montrer l'équation différentielle :
dans les quatre cas :
*angle positif
-pendule descendant
-pendule ascendant
*angle négatif
-pendule descendant
-pendule ascendant
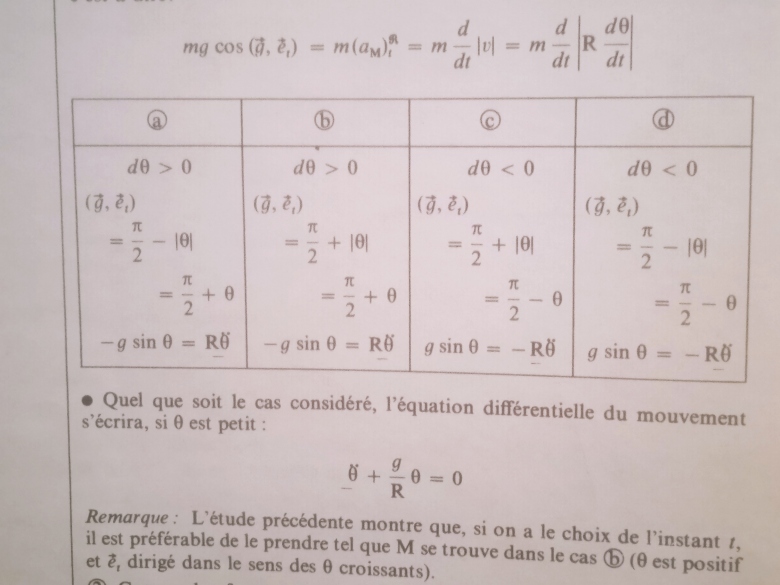
On se place dans un cas simple angle positif, dérivée positive pour éviter des erreurs (cas b), on établit l'équation et c'est fini.
l'auteur a partagé l'avis avec vous (regarde l'image jointe, surtout la remarque)
mais ce ne pas le cas dans tous les circonstance. on a pas toujours le choix de choisir le cas étudié
dans certain exercice ou examen ou concours, ils ont imposé un cas précis (soit a ou b ou c ou d)
donc je dois traiter les différents cas probablement posé, d'abord pour éviter les piège d'une part et maltraiter la manipulation les relation avec les angle positif, négatif les vecteur les projection les dérivés ....
utilisant les "automatismes" liés aux coordonnées polaires (mais il se peut que cela ne soit pas encore automatique, et dans ce cas, c'est un moyen de créer/renforcer de tels automatismes
j'ai mal compris cet énoncé, j'ai pas abordé ces notion dans mon cours. s'il y a un cours qui éclaircir ces notion.
je me questionne encore pourquoi il fait la valeur absolu dans la relation
il veut montrer l'équation différentielle... dans les quatre cas :
Donc il établit bien quatre équations et il s'aperçoit, oh miracle !, qu'elles sont identiques.
dans certains exercices ... , ils ont imposé un cas précis
Je ne vois pas pourquoi on imposerait un cas précis, un lien vers un tel exercice ?
Il n'y a aucune raison d'utiliser la valeur absolue, prenez l'habitude de raisonner algébriquement.
Une référence :
Bonsoir;
Merci beaucoup pour l'explication
moi aussi je ne vois aucun raison pour ajouter une valeur absolue dans la relation fondamental de dynamique.
moi je veut seulement poser le problème pour voir s'il y quelque chose que je ne comprend pas.
les relations qu'on montrer sont très claire et logique
si les deux repère en le même sens
si les repère en de sens contraire
désormais je dois maîtriser les relation de mouvement dans un tel cas.
supposant maintenant que le point matériel est dans la partie des angles positif, en mouvement de descendant ( c à d dans le sens contraire au sens positif)
et astreint à une mouvement uniformément varie.
est ce que l'équation de mouvement s'écrit comme ça:

