Inscription / Connexion Nouveau Sujet
Opérateurs d'inertie
Bonjour, je lance un peu une bouteille à la mer (enfin pas dans n'importe quelle mer).
J'ai beau m'appliquer, lire, relire, dès qu'on sort d'une tige(rigide, homogène), je fais n'importe quoi avec les opérateurs d'inertie.
dω prend une forme étrange dy dθ, dx dy, dm, je suis perdu.
Je ne comprends sûrement pas grand chose à ce que je fais niveau intégration non plus... (je garde en tête les rectangles, aire sous la courbe)
Si quelqu'un avait la patience de m'expliquer un peu comment tout cela fonctionne, je lui en serait infiniment reconnaissant.
Cdt.
Bonjour
Un moment d'inertie s'écrit toujours sous la forme  r2.dmoù r est la distance soit à l'axe, soit au point, soit au plan par rapport auquel on calcul se moment.
r2.dmoù r est la distance soit à l'axe, soit au point, soit au plan par rapport auquel on calcul se moment.
dm= .dV : masse élémentaire = masse volumique par volume élémentaire.
.dV : masse élémentaire = masse volumique par volume élémentaire.
Toujours commencer par étudier les éléments de symétrie du solide : cela simplifie souvent les calculs.
Sinon : pose des questions précises sur ce que tu ne comprends pas avec éventuellement un exemple de chose que tu n'as pas comprise.

Bonsoir à vous deux,
@ lidlkidjoe : j'ai recadré ton scan de l'énoncé de l'exercice sur la figure => il faut recopier la partie texte
D'accord, merci.
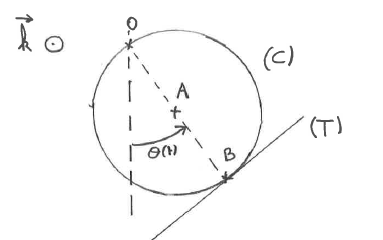
L'énoncé donné :
Donner l'opérateur d'inertie du cercle en A.
Données :
C de masse M de rayon R
Première remarque : moments d'inertie et produits d'inertie sont homogènes au produit d'une masse par le carré d'une distance (unité kg.m2). Des résultats en M.R ou en 2 R sont nécessairement faux.
R sont nécessairement faux.
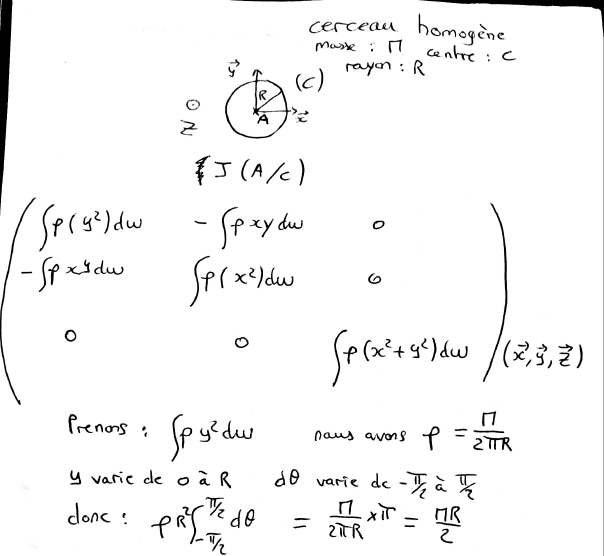
Ensuite, tu n'as pas compris l'intérêt de raisonner sur les symétries du solide qui n'est pas un cercle mais plutôt un cerceau de rayon moyen R et de masse M. Tu n'as ici aucun calcul intégral à faire ; il suffit de réfléchir.
Soit le repère (Axyz) , (Ax) et (Ay) étant dans le plan du disque.
Puisque z=0 en tout point :
Or par raison de symétrie :
Compte tenu des relations de définition :
Je te laisse terminer ; il n'y a aucun calcul intégral pour trouver ces moments d'inertie... Concernant les produits d'inertie : pense à réfléchir aux symétrie au lieu de t'embarquer dans des calculs d'intégrales...
Merci @vanoise, je t'avoue avoir de réelles difficultés à définir d_omega, la tu me donne dm mais par exemple pour le tige on aurait dx si orientée selon x , c'est souvent dans ce choix que je rame , rho = m/v est bien resté dans ma tête mais comme tu le comprends, je gère mal les paramètres... Je vais méditer ta réponse et tenter d'avancer , merci beaucoup en tout cas
Ici, tous les points du cerceau sont à la même distance R de l'axe Az. Le moment d'inertie par rapport à cet axe est donc, sans le moindre calcul, égal à M.R2 ! Relis si nécessaire mon message de 17h45 (la première phrase en particulier).
N'hésite pas à poser d'autres questions ou à poster d'autres exercices que tu as mal compris.

Bonjour, vous allez trouver que j'insiste dans ma bêtise ... est ce que je paramètre mieux mon calcul comme ça ?
Merci d'avance.
Cdt.
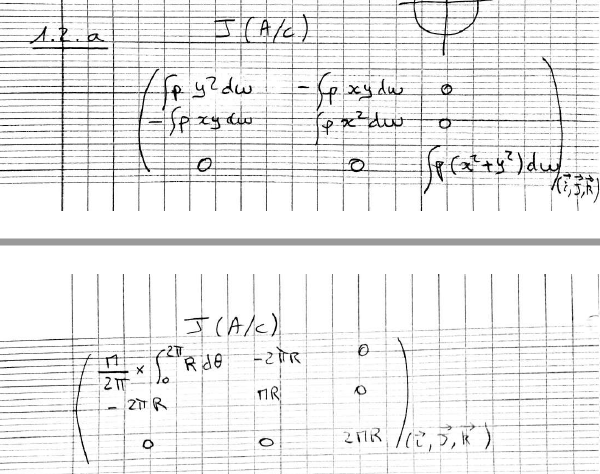
Tu n'as pas compris mon premier message sur l'homogénéité des résultats. Un moment d'inertie est le produit d'une masse par le carré d'une distance. Un résultat en M.R/2 est donc inacceptable.
Reprends mon calcul précédent :
Lors de l'intégration, R2 est une constante vis à vis de la variable d'intégration : on peut donc sortir R2 de l'intégrale et la somme des "dm" est évidemment la masse totale.
Si tu veux passer par la masse linéique, pourquoi pas mais cela n'a aucun intérêt ici compte tenu du raisonnement précédent hyper simple. On définit alors la masse linéique comme le rapport masse sur périmètre du cerceau :
Attention :  désigne un angle mesuré à partir du centre A, rien à voir avec le ta première figure.
désigne un angle mesuré à partir du centre A, rien à voir avec le ta première figure.
Compte tenu de mon message précédent :
Pour les produit d'inertie : aucun calcul à faire : il suffit de raisonner sur les symétries.
@vanoise, j'ai bien compris ce que tu me dis, je ne confond pas le
je cherche juste avec les outils que le prof nous donne, à savoir la matrice d'inertie, à trouver comment je choisis les paramètres.
Alors comme est constant , on le sort , je suis d'accord et donc c'est le
qui vaut
c'est bien ça ?
Car on intègre :
@Vanoise, connais tu Discord ( discussion en ligne) , je peux créer un serveur et nous pourrions discuter de vive voix , la suppression du serveur ainsi que ton refus à une invitation , que je ne t'enverrai pas, garantissent ton anonymat.
Si tu acceptais, je pense que ça simplifierait les choses , en tout cas pour moi.
Je peux t'envoyer un lien : discord et disponible sans installation au cas où.
Cdt.
Un petit élément de cerceau a pour longueur dl=R.d : cela résulte de la définition de l'angle exprimé en radian. La masse de cet élément est donc :
dm= .dl=R.d ; d'où la formule déjà écrite :
.dl=R.d ; d'où la formule déjà écrite :
Pour obtenir le cerceau en entier, il faut intégrer de 0 à 2 ou, si tu préfères, de - à (en radians).
Je reviens aux fondamentaux : le plus important sur le sujet a été écrit dans mon premier message :
"Un moment d'inertie s'écrit toujours sous la forme r2.dm où r est la distance soit à l'axe, soit au point, soit au plan par rapport auquel on calcule ce moment."
Bon je vais essayer de changer de point de vue.
Si le moment d'inertie est toujours et que
nous avons pour le cerceau dont
car pas de volume et pas de surface, nous avons donc :
Attention : l'expression générale d'un moment d'inertie est toujours de la forme : ; écrire
n'as pas de sens. L'essentiel à comprendre : si toutes les masses élémentaires dm sont à la même distance R de l'axe par rapport auquel on calcule le moment d'inertie : r=constante=R dans le calcul intégral :
S'il faut faire un calcul intégral, totalement inutile ici, il faut distinguer trois cas :
1° distribution linéique de masse : cerceau, tige : dm=.dl avec : masse linéique ;
2° distribution surfacique de masse : plaque, coque... : dm =  .dS ou : masse surfacique
.dS ou : masse surfacique
3° distribution volumique de masse : le cas le plus général : boule, cube... : dm=.dV avec : masse volumique.
Bonjour, merci vanoise pour ta grande patience , donc pour avoir besoin d'intégrer il faudrait par exemple que la figure soit un " treillis " de forme triangulaire
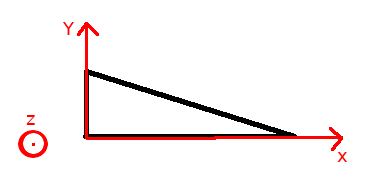
A priori, il s'agit d'une distribution linéique de masse : la masse linéique est la même pour les trois tiges ?
Il faudrait dimensionner tout cela et se fixer des objectifs : matrice d'inertie à l'origine O du repère ?
Je te laisse préciser tout cela et faire une proposition de solution.
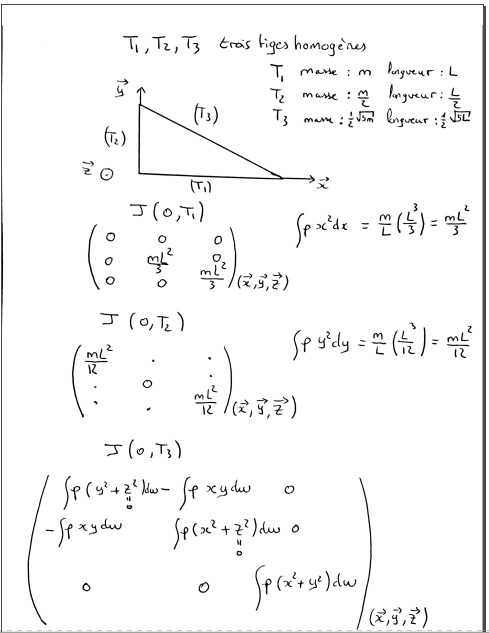
Peut-être seulement une étourderie d'écriture. En supposant la masse linéique identique pour les trois tiges :
et
Matrice d'inertie de T1 : tout est bon ; tu vois : tu progresses !
Matrice d'inertie de T2 : par un raisonnement analogue :
OK pour les produits d'inertie nuls.
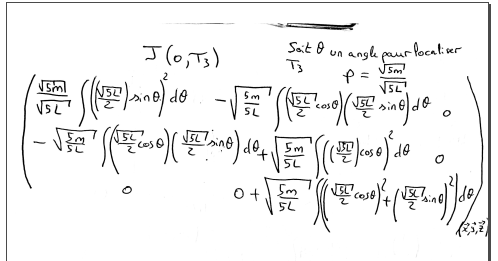
Concernant T3 ; je crois que tu te compliques la vie. Je te fournis la méthode pour la moment d'inertie par rapport à (Ox) et te laisse ensuite terminer. On considère un tronçon élémentaire de tige de longueur dl, de masse .dl, situé à la distance l de l'extrémité A :
Des simplifications sont possibles :
Un peu, un peu... , j'arrive pas à comprendre comment j'ai viré le facteur dans la matrice
Ça à l'air tellement évident pour toi.
Je rame, je rame, merci encore beaucoup.