Inscription / Connexion Nouveau Sujet
Modèle de satellite en haltère
Bonjour, j'ai des difficultés à résoudre un problème de mécanique que voici:
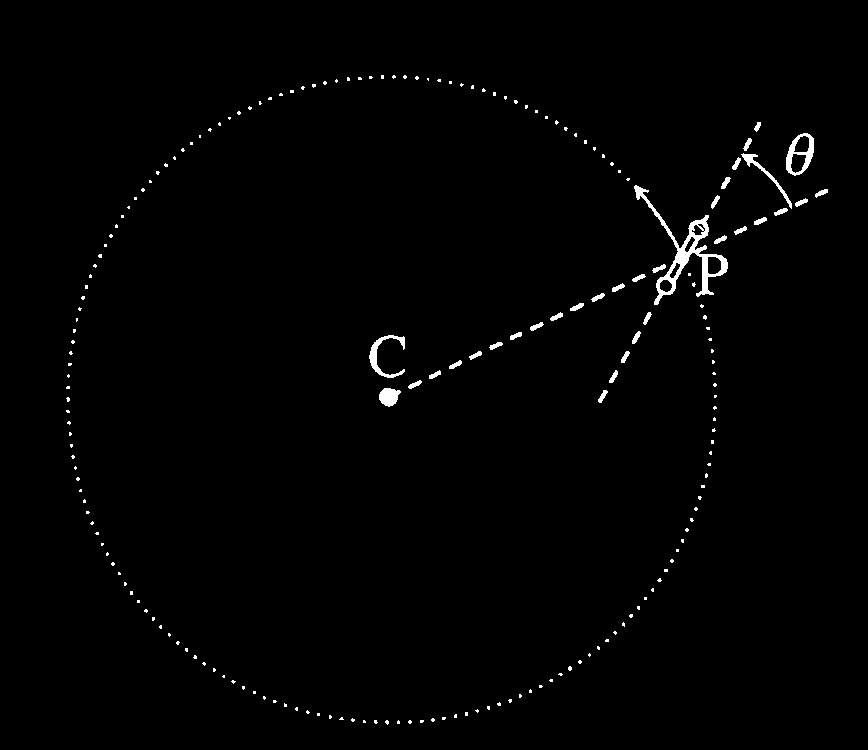
Nous supposons un satellite en orbite composé d'une tige rigide de longueur 2d de masse négligeable avec, aux extrémités, deux masses (m). Le centre de masse est P.
Nous supposons qu'il orbite un corp C, de masse M à une distance r. Nous supposons d<<r et m<<M.
1) En supposant que la tige est parallèle à la direction radiale (). Calculer les forces
et
s'exerçantes sur la tige.
On appelle A la masse la plus proche de C, étant donné que la masse A reste à l'équilibre à r-d,
Ici correspond à la tension qu'exerce la masse A sur la tige (d'ou le signe -).
On a donc:
De plus, de part le mouvement du centre de masse, nous trouvons facilement
Pour simplifier, projetons sur la direction radiale (CP)
Appliquons un développement limité à l'ordre 1 sur le dénominateur.
Donc:
Similairement pour B:
Déjà j'aimerais savoir si cela est juste ?
2) Maintenant la tige fait un angle theta avec la direction radiale. Calculer le moment de la force.
Si je ne me trompes pas, nous avons
La norme de ce vecteur est donc:
Maintenant je ne sais pas trop quoi faire pour calculer le moment de la force, devrais-je prendre en compte la force centrifuge comme précédemment ? ou uniquement la force gravitationnelle ? J'ai trouvé des ouvrages de mécanique spatiale dans ces derniers ils ont un problème similaire mais avec une structure plus générale qu'une haltère et ils ne prennent pas en compte la force centrifuge, cependant cela me parait bizarre car les masses sont bien soumises à une "force" allant dans l'autre direction de part la rotation au tour de C.
Bonjour,
Pourquoi voulez-vous changer de méthode ? C'est rigoureusement le même calcul, la différence étant la distance entre la trajectoire de A et de P et la direction des forces par rapport à la tige.
Ceci étant, le texte n'est quand même pas très précis : pour ce qui est de 1, vous avez du supposer que A est à l'équilibre, ce qui n'est pas indiqué par le texte, mais qui est éventuellement possible pour la question 1 (qui est une position d'équilibre), mais qui devient acrobatique pour la question 2.
Dit autrement, la force FA dépend du mouvement relatif de A par rapport à P.
Ce qui serait plus simple serait de calculer la résultante des forces gravitationnelles et d'inertie dans le référentiel tournant d'origine P sur A et B (qui correspond à votre calcul mais FA n'est pas la force subie par la tige dans le cas général)
Pour ce qui est des ouvrages consultés, il faudrait indiquer un lien, mais s'ils font l'étude dans le référentiel géocentrique, il n'y a pas de forces d'inertie.
Bonjour,
Pourquoi voulez-vous changer de méthode ? C'est rigoureusement le même calcul, la différence étant la distance entre la trajectoire de A et de P et la direction des forces par rapport à la tige.
Ceci étant, le texte n'est quand même pas très précis : pour ce qui est de 1, vous avez du supposer que A est à l'équilibre, ce qui n'est pas indiqué par le texte, mais qui est éventuellement possible pour la question 1 (qui est une position d'équilibre), mais qui devient acrobatique pour la question 2.
Dit autrement, la force FA dépend du mouvement relatif de A par rapport à P.
Ce qui serait plus simple serait de calculer la résultante des forces gravitationnelles et d'inertie dans le référentiel tournant d'origine P sur A et B (qui correspond à votre calcul mais FA n'est pas la force subie par la tige dans le cas général)
Pour ce qui est des ouvrages consultés, il faudrait indiquer un lien, mais s'ils font l'étude dans le référentiel géocentrique, il n'y a pas de forces d'inertie.
Bonjour,
Merci de la réponse, pour ce qui est de l'énoncé, c'est parce que je me suis mal exprimé, ce n'est pas vraiment que la masse A est à l'équilibre mais qu'étant donné que le satellite est bloqué dans son alignement (\theta=0) et qu'il est toujours à une distance r de la planète, alors forcément A est toujours à r-d.
Ensuite, le problème que j'ai vient plutôt d'une mauvaise compréhension, je dirais.
Si je travaillais dans le référentiel inertiel géocentrique par exemple, pour la question 1, j'aurais (pour A) :
Avec bien sûr,
Ce qui est strictement identique à la force ressentie dans le référentiel non inertiel si je ne me trompe pas. Cependant, pour le calcul du moment de la force, comme je l'ai mentionné, d'autres sources comme un livre (je ne suis pas sûr d'avoir le droit de donner un lien vers un PDF, donc je donne plutôt une vidéo YouTube faisant la même preuve : https://youtu.be/Duhmy4Z2hzU). Et comme on peut le voir, il ne prend en compte que la force gravitationnelle et non pas
Aussi, pourriez-vous élaborer un peu sur pourquoi
Pour ce qui est de la force FA, on a simplement qui donne bien votre résultat uniquement si θ(t)=0, qui ne peut être obtenu qu'à l'équilibre (sinon comment bloque-t-on le satellite ?)
Que vous fassiez le calcul dans le référentiel géocentrique ou non ne change pas FA, c'est tout à fait normal, cela fait partie des principes de la mécanique.
Si vous ne donnez pas de lien textuel, je veux bien essayer de regarder la video, mais je trouve cela assez difficile à suivre contrairement à un texte où l'on peut passer d'un paragraphe à un autre de manière simple.
Si vous tenez à suivre votre texte, le calcul va être moins simple puisqu'il va falloir tenir compte du terme .
Pour ce qui est de la force FA, on a simplement
Que vous fassiez le calcul dans le référentiel géocentrique ou non ne change pas FA, c'est tout à fait normal, cela fait partie des principes de la mécanique.
Si vous ne donnez pas de lien textuel, je veux bien essayer de regarder la video, mais je trouve cela assez difficile à suivre contrairement à un texte où l'on peut passer d'un paragraphe à un autre de manière simple.
Si vous tenez à suivre votre texte, le calcul va être moins simple puisqu'il va falloir tenir compte du terme
Voici le lien dont je parlais (P. 530) :
Cependant je ne suis pas sur de comprendre votre accélération, pourquoi y a t-il des
Le fait est que j'ai du mal à voir les prochaines étapes et que je ne sais pas vraiment comment aborder ce problème ni quelle serait la méthode la plus optimale pour le faire.
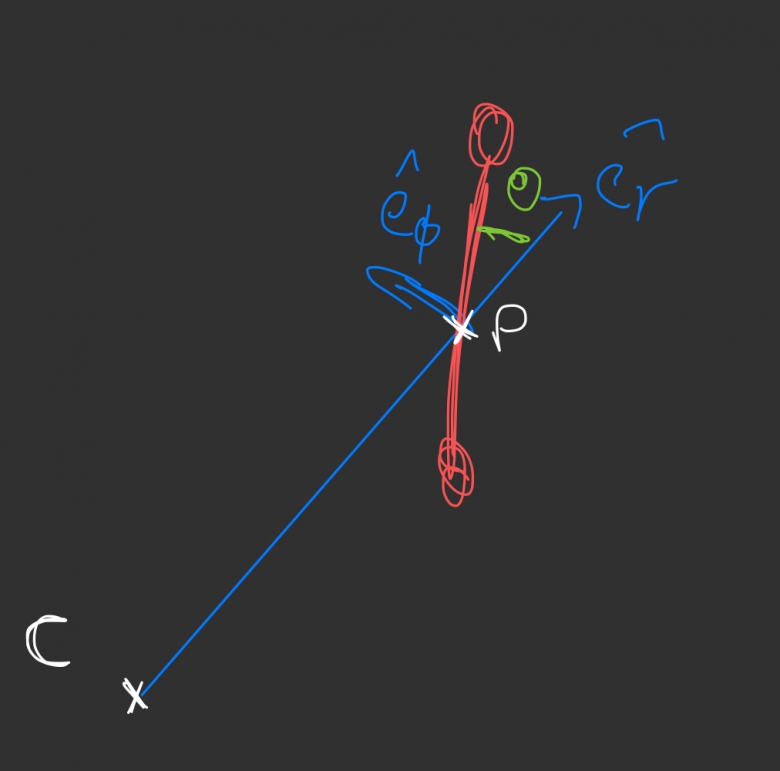
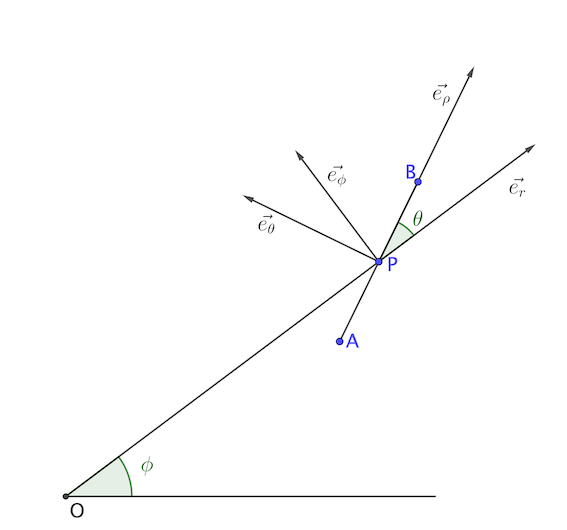
Pour ce qui des accélérations, je n'avais en effet pas défini explicitement mes vecteurs unitaires. Voir ci-dessous.
p. 530 sqq, le calcul est bien fait dans un référentiel galiléen et le cas traité en bas de la p 533 est relative à la question 1 avec ωy=n (orbit).
Pour la 2, vous faites le même calcul que pour 1, ll y a deux différences la distance entre "l'orbite de A" et l'orbite de P est , donc il suffit de remplacer d par
; et deuxième différence si vous tenez à suivre votre texte, il faut prendre en compte l'accélération de A dans le mouvement autour de P. Mais, de nouveau, cette force FA complique les choses plutôt qu'elle ne les simplifie et il est plus simple de calculer uniquement forces de gravitation + inertie. De quel moment (de quelle force, par rapport à quel point) est-il précisément question (le texte manque de précision) ? Si on calcule le moment résultant sur le satellite c'est beaucoup plus simple et on peut oublier FA.
Si on avait la question suivante, cela pourrait s'éclaircir.
Voici l'énoncé d'origine que j'ai traduit. Il était en japonais à la base, et je l'ai traduit entièrement mot pour mot cette fois ci.
On considère la stabilité directionnelle d'un satellite artificiel allongé équipé d'un télescope à l'aide du modèle suivant. Comme indiqué sur la figure 1, le centre de masse d'un objet constitué d'une barre rigide de longueur
Ici, aucune force extérieure autre que la gravité de
(1) Lorsque l'axe longitudinal de l'objet (la direction de la barre rigide) est constamment orienté vers l'astre
(2) Lorsque l'angle entre l'axe longitudinal de l'objet et la ligne reliant l'astre
(3) Écrire l'équation du mouvement pour la rotation de l'objet autour d'un axe passant par
(4) En supposant que
(5) On suppose que l'objet maintient son axe longitudinal constamment orienté vers
Et merci pour l'éclaircissement, je comprends mieux la situation au niveau du repère.
Cependant, j'ai du mal à cerner le problème que vous décrivez par rapport à l'acceleration ?
L'accélération n'est pas un problème, c'est juste que vous faites un calcul inutile. La question 2 demande le moment des forces agissant sur l'objet, donc vous n'avez pas besoin de FA (force interne) mais uniquement des forces de gravitation et d'inertie et, encore une fois, c'est rigoureusement le même calcul que 1 ().
Le texte dit bien "constamment orienté" donc θ(t)=0 et votre 1 est donc correct.
Donc, je peux calculer exactement de la même manière? par exemple la force totale sur la masse A:
On a:
La norme de ce vecteur est donc:
En faisant à nouveau un développement limité et en simplifiant:
Est-ce correcte ?
Cela impliquerait donc une contribution de:
?
C'est correct :
On a bien la même chose que 1 à près.
?
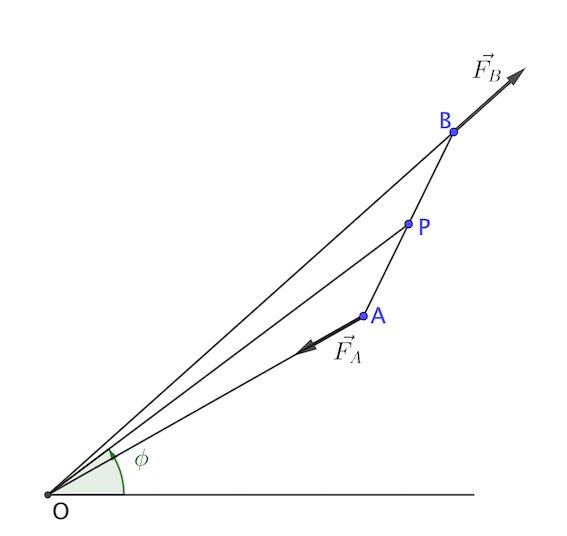
OK au signe près ce qui se voit sur la figure pour φ>0, le moment est négatif.
D'accord, merci beaucoup, je comprends mieux.
Juste pour bien commencer la question 3, quel théorème / quelle méthode devrais-je utiliser ?
Bonne fin d'après-midi à vous.
Pour la 3, cela tourne autour d'un axe, on connait le moment, donc théorème du moment cinétique scalaire.
Juste, je voulais encore m'assurer d'une chose, pour appliquer le théorème du moment d'inertie, n'y a t-il pas des effets secondaires de s'être placé dans un référentiel non-inertiel ?
Par ça, je veux dire par exemple un "pseudo moment de force":
Sinon, en supposant que je n'ai pas à faire de telles considérations, j'ai:
Donc:
Et pour un petit :
Je ne comprends pas trop pour le théorème du moment d'inertie : dans un référentiel non galiléen, c'est la même chose que dans un galiléen, sauf qu'il faut tenir compte des forces d'inertie (il faudrait d'ailleurs justifier que la force de Coriolis n'apparait pas).
L'équation finale est correcte.
Donc si j'ai pris en compte les forces inertielles je peux traiter le référentiel comme un référentiel inertiel peut importe la loi que j'applique ?
Aussi, je me demandais. Au final ne serait t-il pas plus simple de calculer le moment dans le référentiel inertiel ? ça permettrait de prendre uniquement en compte la gravité non? Je ne vois pas vraiment ou le moment circulaire rentrerait en compte en faisant cela ?
(Je pose plutôt cette dernière question pour améliorer mon "intuition" pour être plus à même de résoudre d'autres problèmes à l'avenir)
Donc si j'ai pris en compte les forces inertielles je peux traiter le référentiel comme un référentiel inertiel peut importe la loi que j'applique ?
C'est le principe même des forces d'inertie : on ajoute des forces pour que les équations aient la même forme.
Au final ne serait t-il pas plus simple de calculer le moment dans le référentiel inertiel ?
C'est un problème de point de vue : les équations sont identiques. Prenons l'exemple simple d'un mouvement plan sur un cercle.
Dans le référentiel galiléen, on a
Dans le référentiel tournant, on a
Le mouvement circulaire intervient dans l'accélération.
Mais au moment de calculer le moment de la force, l'accélération ne sera pas prise en compte ?
Donc nous n'aurions pas forcément la même forme pour le moment de la force ?

