Inscription / Connexion Nouveau Sujet
Mécanique vibratoire
Bonjour à toutes et à tous,
J'ai de nombreuses questions sur un exercices de mécanique vibratoire, qui à l'air de poser pas mal de soucis  En effet, je ne comprend même pas comment démarer. J'hésite à commencer par la fin, car cela me semble plus facile, mais j'aimerai bien avoir des pistes autres. Donc si une âme charitable veut bien me donner un peut de son tems pour m'expliquer par où commencer et surtout comment bien commencer, je vous en serais reconnaissante.
En effet, je ne comprend même pas comment démarer. J'hésite à commencer par la fin, car cela me semble plus facile, mais j'aimerai bien avoir des pistes autres. Donc si une âme charitable veut bien me donner un peut de son tems pour m'expliquer par où commencer et surtout comment bien commencer, je vous en serais reconnaissante.
Voici le sujet:
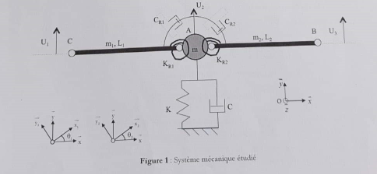
Le mouvement du système mécanique de la figure 1 est étudié par rapport au référentiel d'observation . Le système est constitué par :
1. Une barre CA de longeur L1 et de masse M1. Cette barre est reliée à une pivot d'axe en A.
Soit , le repère lié à la barre CA.
2. Une barre AB de longeur L2 et de masse M2. Cette barre est reliée à une pivot d'axe en A.
Soit , le repère lié à la barre AB.
3. Une masse ponctuelle m placée en A.
4. La masse m est reliée à un ressort de raideur K et à un amortisseur de constante C.
5. Deux couples d'amortisseurs de constantes Cr1 et Cr2 et deux couples de torsion
Kr1 et Kr2 sont reliés respectivements aux barres CA et AB.
6. Tout les déplacements se font suivant l'axe .
Lorsque le système mécanique de la figure 1 est au repos, les barres AB et CA sont horizontales.
Question 1.1 : Ecrire les équations de mouvement.
Question 1.2 : On suppose maintenant que le système est doté d'un pivot d'axe en C
1.2.1 : Ecrire les nouvelles équations de mouvement.
1.2.2 : En supposant, dans ce cas, que m et M1 sont nulles et que K et Kr1 sont également nulles, donner les formes analytiques des pulsations propres de ce nouveau système.
Question 1.3 : On suppose maintenant que le système est doté d'un pivot d'axe en C et d'un pivot d'axe
en B.
1.3.1 : Ecrire les nouvelles équations de mouvement.
1.3.2 : Donner la forme analytique de la pulsation propre.
1.3.3 : Donner la forme analytique du facteur d'amortissement.
Question 1.4 : On suppose maintenant que la masse m du système est fixe.
1.4.1 : Ecrire les nouvelles équations de mouvement.
1.4.2 : Donner la forme analytique des pulsations dans le cas ou M1=M2, L1=L2, Kr1=Kr2.