Inscription / Connexion Nouveau Sujet
Mécanique non galiléenne
bonjour à tous,
J'ai un petit soucis sur un exo de physique, sur une leçon où je n'ai pas tout bien compris, pourriez-vous me donner un petit indice ?
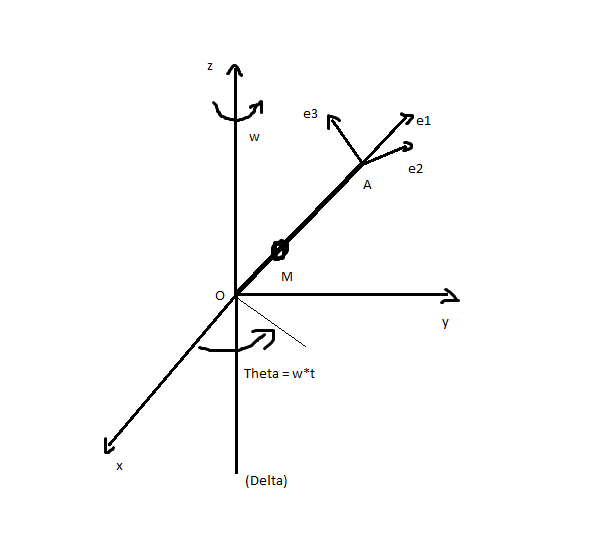
Soit un petit anneau M susceptible de se déplacer sur un axe OA de longueur l, effectuant des mouvements de rotation caractérisés par une vitesse angulaire constante w autour d'un axe fixe vertical (Delta) passant par O.
Le référentiel lié au labo est considéré comme galiléen, noté R. Le référentiel lié à la tige est noté R'. OA fait un angle  < Pi/2 avec (Delta). La position de l'anneau est repérée par la distance r tq OM = r e1 dans le réf de la tige. L'anneau est libéré sans vitesse initiale par rapport à la tige à une distance r0 du point O
< Pi/2 avec (Delta). La position de l'anneau est repérée par la distance r tq OM = r e1 dans le réf de la tige. L'anneau est libéré sans vitesse initiale par rapport à la tige à une distance r0 du point O
1) Déterminer la vitesse de M par rapport au référentiel R. On exprimera ce vecteur dans la base (e1,e2,e3)
Voir dessin
Je compte utiliser la composition des vitesse
v(M)R= v(M)R'+v(0)R+ R'/R
R'/R OM
OM
v(M)R'= dr/dt e1 car M en translation sur OA
v(0)R = 0 car 0 est fixe dans R
Je ne sais pas si deja ces premiers résultats sont justes
Apres je ne suis pas sur de comment trouver R'/R. J'aurai envie d'écrire que c'est
wz mais bon je n'en suis absolument pas certain..
Merci d'avance
bonjour,
je suis d'accord pour le début, après je pense que le plus simple est de résoudre le mouvement en coordonnées cylindriques et tu décomposes ton vecteur Om selon ur,u(theta) et uz ( vecteurs cylindriques ). Ensuite tu dérives pour obtenir la vitesse du point M. Sinon ta technique marche aussi et dans ce cas la il faut calculer le produit vectoriel ensachant que ton vecteur rotation est dirigée selon z, et OM il faut l'exprimer avec r donc en coordonnées cylindriques. Les deux techniques sont équilvalentes mais je trouve la première plus simple.
Bonne chance
En fait l'énoncé me dit de passer par la composition des vitesses (je ne l'ai pas écrit mais). Et puis même, comme ca ca m'entrainera et je comprendrai un peu mieux le cours (enfin j'espere).
Donc il faut que j'arrive à calculer OM
ce qui revient à calculer finalement ze1
Le problème c'est que je n'arrive pas à bien visualiser la figure, et j'ai donc du mal à projeter z dans la base (e1,e2,e3). Vous pouvez m'aider?

