Inscription / Connexion Nouveau Sujet
Mécanique Générale
Bonjour tout le monde,
Je m'entraîne sur un sujet d'exercice sans correction.
Je souhaiterais avoir une confirmation de mes résultats.
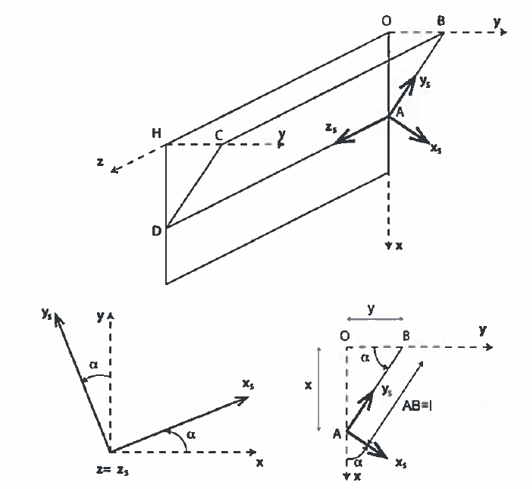
Une porte de garage carrée ABCD est constituée d'une plaque. Le repère est lié à la plaque :
Un repère galiléen est lié au bâti du garage.
Les deux points de la porte A et D sont en liaison avec le bâti de telle façon qu'ils décrivent respectivement les droites du bâti avec
.
Les deux points B et C de la porte décrivent respectivement les droites
La position de la porte est repérée danspar
, dérivable 2 fois.
.
On pose et
Le centre de gravité de la porte est situé en G tel que . La masse de la porte est m. La matrice d'inertie au point A et dans la base
est :
Questions :
1.Calculer et
2.Calculer la vitesse de G :
3.Calculer la vitesse de A :
4.Calculer l'accélération de G en fonction de et
Il faut dériver le vecteur vitesse or comme je ne suis pas sûr des mes résultats, je me suis arrêtée ici.
Qu'en pensez-vous ? Suis-je sur la bonne voie ?
Cordialement,
CloudNine
Bonsoir
À ce que je comprends, les vecteurs vitesses et accélérations doivent être exprimés en fonction de l et des dérivés par rapport au temps de  .
.
Bonsoir
À ce que je comprends, les vecteurs vitesses et accélérations doivent être exprimés en fonction de l et des dérivés par rapport au temps de
.Bonsoir,
Oui c'est bien ça.
Je vais t'aider pour l'expression de la vitesse de G dans le repère galiléen (g) en prenant en compte les remarques de mes messages précédents. Plusieurs méthodes sont possibles. La plus simple consiste sans doute à exprimer le vecteur OG dans (g) :
donc :
Je te laisse continuer.

Pas tout à fait : en dérivant le sinus et le cosinus par rapport à t, une dérivée de par rapport à t supplémentaire apparaît :
La vitesse angulaire apparaît au carré dans l'expression de l'accélération : sinon la relation ne serait pas homogène.
Ah oui j'ai oublié la alpha au carré. Merci !
2.Calculer la vitesse de G :
3.Calculer la vitesse A: \vec{v}\left(A\right)
Qu'en pensez du résultat de vitesse de A ?
Un camarade à moi, trouve que:
car x est fixe.
Merci,
Vous vous trompez tous les deux !
Quand tu obtiens un résultat littéral, il est prudent de vérifier deux choses qui , sans être des preuves d'un bon résultat, permettent d'éviter de grosses erreurs :
1° : vérifier l'homogénéité des formules ;
2° : vérifier le réalisme. Ici, l'énoncé précise que le point A se déplace en restant sur l'axe des abscisses. Le vecteur vitesse de A dans (g) n'est donc pas nulle dans le cas général et est colinéaire au vecteur unitaire :
Tu n'as plus qu'à dériver par rapport au temps.
Merci beaucoup pour votre réponse.
Comment vérifie-t-on l'homogénéité des formules ? Par une analyse dimensionnelle ?
Si par exemple, je n'exprime pas ou bien
dans mes dérivées, dans mes formules... Est-ce que c'est considéré comme une erreur.
Par exemple, on pourrait écrire pour le vecteur
Merci,
CloudNine
Par une analyse dimensionnelle ?
Oui : cela va très vite avec un peu d'habitude.
Voilà bien une formule certainement fausse car non homogène : une vitesse est homogène à une distance divisée par une durée ; or une vitesse angulaire est homogène à l'inverse d'une durée : un terme en (
Quand l'énoncé ne précise pas dans quelle base exprimer les vecteurs vitesse et accélération, il faut choisir une base fixe dans le repère d'étude (g). Dans certains problèmes, il peut être intéressant d'exprimer la vitesse dans (g) en choisissant une base mobile dans (g), par exemple la base
Merci beaucoup pour votre explication claire et précise.
Concernant la suite de l'exercice:
5.Déduire de la question précédente la somme du torseur dynamique {} dans le repère (S) en fonction de
.
On peut écrire:
6.Calculer en fonction le moment en A du torseur dynamique dans le repère (S).
Qu'en pensez-vous du résultat ?
Cordialement,
CloudNine
Ton expression de l'accélération de G dans le repère G est certainement fausse : elle n'est pas homogène : tu additionnes une accélération angulaire avec une vitesse angulaire !
Puisque je t'ai déjà aidé à exprimer cette accélération dans la base , tu peux l'exprimer dans la base
en remarquant :
Tout cela est bien calculatoire... Est-ce bien nécessaire d'exprimer la résultante dynamique et le moment dynamique en A dans la base mobile ?

