Inscription / Connexion Nouveau Sujet
mécanique du solide : roue sur tapis roulant
Voici l'énoncé de mon exercice avec quelques éléments de réponses. Pouvez-vous m'apporter quelques précisons pour le calcul du glissement demandé et des indications pour que je puisse continuer à partir du 3e), je vous remercie par avance.
On s'intéresse à une roue, de centre de gravité C, ayant les caractéristiques suivantes : masse M, rayon a, moment d'inertie par rapport à son axe de symétrie : 2
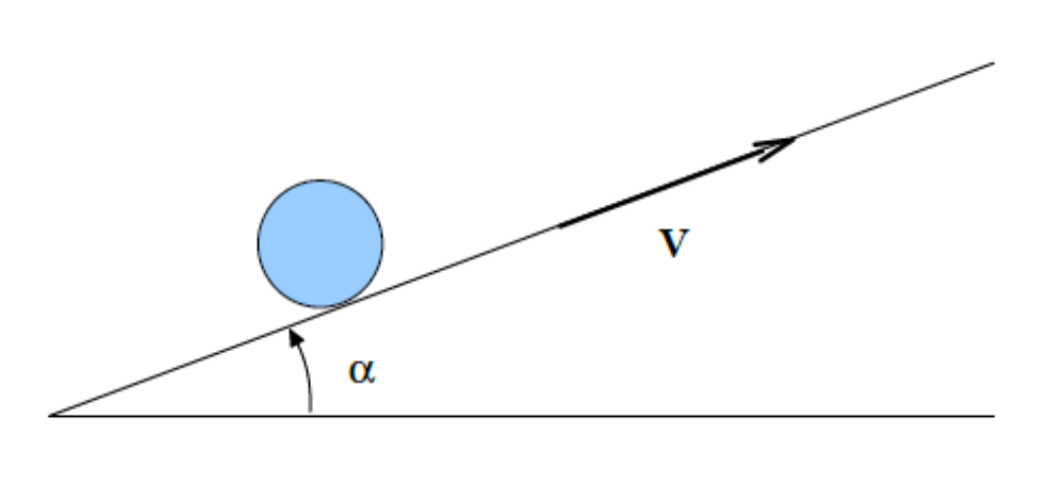
Le tapis roulant est en mouvement avec le vecteur vitesse \vec{V} pour sa partie supérieure depuis un temps long. La roue est alors posée sans vitesse de son centre d'inertie et sans vecteur rotation sur le tapis roulant (supposé en mouvement avec le vecteur vitesse \vec{V} ) à l'instant t 0 que l'on prendra comme origine des temps. On supposera que la norme de \vec{V} est constante et égale à V avec V 0 . Ce tapis roulant fait un angle alpha avec l'horizontale.
On supposera le contact entre la roue et son support horizontal ponctuel. Le coefficient de frottement de la roue sur le sol sera supposé constant et noté f qu'il soit statique ou cinétique dans toute la suite de ce sujet. (On suppose que f tan ). Toute l'étude sera réalisée dans le référentiel lié au laboratoire et supposé galiléen.
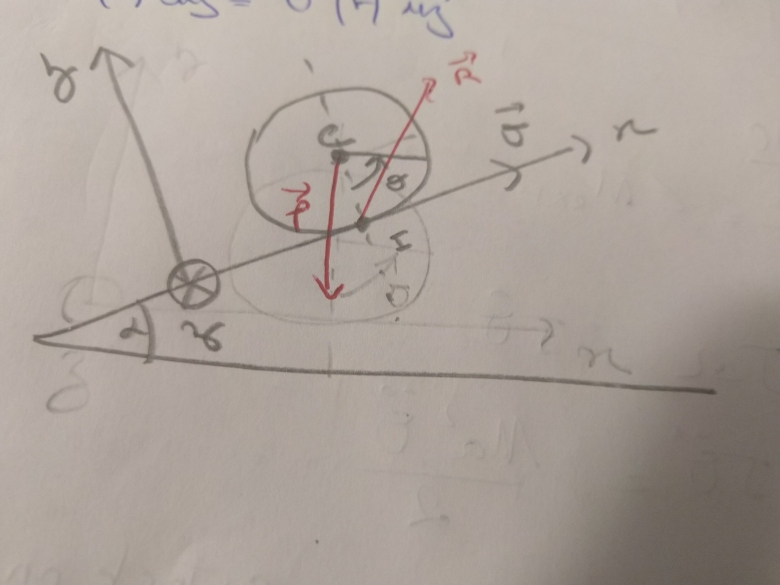
1) Paramétrage de notre roue : Reprendre le schéma suivant sur votre copie en y indiquant l'orientation du repère cartésien Oxyz lié au référentiel du laboratoire et l'angle théta t repérant la rotation de la roue dans le référentiel du laboratoire de façon que : le vecteur rotation de la roue dans le laboratoire soit :
x t soit l'abscisse du centre d'inertie C de cette roue le long de la ligne de plus grande pente de ce plan incliné. L'axe Ox sera orienté dans le même sens que le vecteur vitesse du tapis roulant.
2) Après avoir défini la vitesse de glissement au niveau du point de contact entre la roue et le sol, montrer qu'elle est telle que vgl est telle qu'à l'instant initial : vgl(t=0)=-V<0
vgl/tapis=V (I E roue) - v(I E tapis)
je ne sais pas trop comment continuer
3) On étudie dans cette question le mouvement tant qu'il y a glissement. La réaction du tapis sur la roue sera notée : x
y
a. Montrer que l'application du théorème du centre d'inertie mène aux deux équations suivantes : (1) x-Mgsin(
)
(2) : 0=Ry-Mgcos()
TCI :
Bilan des forces : P, R
Projection :
Ox : (1)
Oy : (2)
b. Montrer que l'application du théorème du moment cinétique barycentrique mène à l'équation suivante :
x (3)
TMC = \frac{dL*}{dt} = \sum{Mext}
L*= J = J
Mext = Mcpesanteur + Mccontact en I
= 0 + MIcontact en I+RI .
On dérive L*
Et on trouve (3)
c. Montrer alors que les lois de Coulomb pour le contact entre la roue et le tapis mène à : R(x) fMg x cos (4)
d. A l'aide des quatre dernières équations montrer que :
et
On part de (1), on remplace Rx par (4) puis on intègre et on trouve l'équation demandée.
Pour la 2ème, on part de (3), idem on remplace Rx par (4) puis on intègre et on trouve l'équation demandée.
e. Montrer que la phase de glissement est valide tant que t<t1 tel que :
t1=
et vous vérifierez que t1 >0
f. Exprimer alors t1)que l'on notera V1 dans la suite de l'énoncé. Quel est le signe de V1 ?
g. Exprimer alors t t1 que l'on notera 1 dans la suite de l'énoncé. Quel est le signe de 1 ?
4) On étudie maintenant le mouvement pour t>t1 . On fait maintenant l'hypothèse d'une phase de non-glissement pour t>t1 .
Montrer que :
a. Rx =
et Ry = Mgcos()
b.
c.
d. Valider à la vue des expressions de la question a) précédente l'hypothèse de non glissement de cette deuxième phase du mouvement.
Bonjour
La vitesse de glissement en I (point de contact de la roue avec le tapis) de la roue par rapport au tapis est :
Lorsque la roue entre en contact avec le tapis, la relation de Varignon ou tout autre méthode conduit à :
Les différentes vitesses sont mesurées dans le repère terrestre supposé galiléen.
Si je comprends bien, tu as quelques difficultés à partir de 3e). Remarque préliminaire : tes orientations sont cohérentes avec les équations proposées à condition que l'axe (Oz) soit orienté vers l'avant de la figure. Cela n'apparaît pas sur ton schéma. Pour 3e) : l'expression générale de la vitesse de glissement en I est :
En tenant compte des expressions de la vitesse de C et de la vitesse angulaire obtenues aux questions précédentes :
La phase de glissement s'arrête à la date t1 telle que la vitesse de glissement devient le vecteur nul. Attention : un g manque au dénominateur de l'expression de t1 que tu as copiée.
Bonjour,
Je vous remercie beaucoup pour vos explications, cependant si vous avez des conseils pour mieux réussir en mécanique des solides je suis preneuse par exemple en orientation, je n'avais pas trop de problème en mécanique du point mais là je patauge un peu.
Je reprends l'exo avec vos indications.
Le sens positif d'orientation de l'angle de rotation et le sens du vecteur rotation se correspondent par la règle du tire bouchon de Maxwell. Tu connais ?
Bonjour,
Oui je connais la règle du tire-bouchon mais pour ce chapitre, je ne me souviens pas de l'avoir entendu. Pouvez-vous me tire comment il est utilisé, je vous remercie.
Cette règle est beaucoup utilisée en électromagnétisme mais elle peut être adaptée à de nombreuses situations faisant intervenir des produits vectoriels.
Ici : imagine un tire bouchon (ou un tournevis) tournant dans le sens choisi comme sens de rotation positif. Le sens de translation du tire bouchon indique le sens du vecteur rotation instantané . Si tu n'es pas très habituée à l'utilisation de ces instruments, tu peux utiliser une variante : la règle de la main droite. Imagine ta main droite avec les quatre doigts (pas le pouce) repliés de façon que le bout des doigts indique le sens de rotation positif choisi ; le pouce indique le sens du vecteur
. Voir les schémas de ce document à adapter car il y est question de magnétisme.
![]()

