Inscription / Connexion Nouveau Sujet
mécanique du solide
Bonjour à tous,
Je souhaiterai avoir quelques explications.
Voici l'énonce de l'exercice:
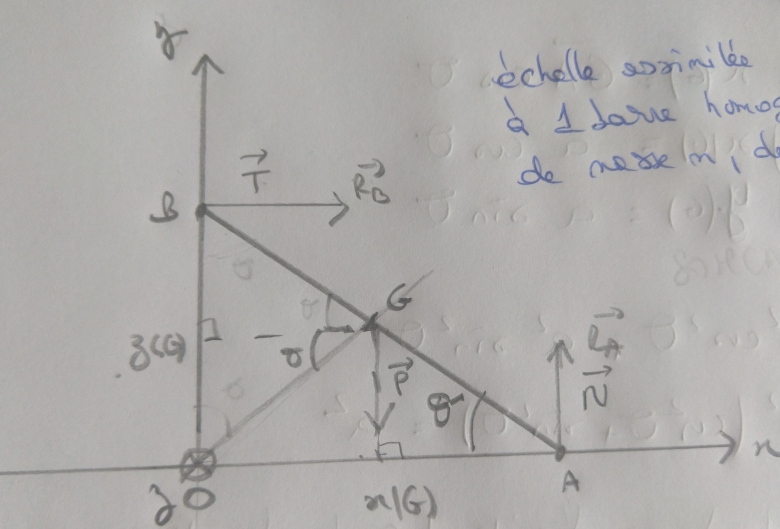
Une échelle AB de masse m , de longueur 2a est assimilée à une barre homogène d'épaisseur négligeable. Elle est en contact sans frottement sur le sol horizontal en A et sur le mur vertical en B. On note Ra et Rb les réactions du sol et du mur sur l'échelle. Elle est lâchée sans vitesse initiale pour
Voici ce qui me pose problème.
Appliquer les théorèmes du centre d'inertie et du moment cinétique en G. En déduire l'équation différentielle vérifiée par .
TCI:
dP/dt=
Projection :
m(G)=mgasin
+Rb (1)
m(G)=mgacos
+Ra (2)
or x(G)=a cos
alors (G)=-
de même y(G)= a sin
alors
Qu'on insère dans les expressions 1 et 2 et nous donne Ra et Rb.
Ensuite, TMC:
dL*/dt=
MGpesanteur +MGcontact en A+MGcontact en B = Ra
Je suis complètement embrouillée d'où il me parait difficile de sortir une équation différentielle en Avec le TCI.
Et le L*= J
Je vous remercie par avance.
Bonjour
Pour bien fixer les notations et surtout les convention d'orientations et de signes, il faudrait que tu postes un schéma propre où figureraient les différents vecteurs utiles et les orientations des axes.
Cet énoncé n'est pas très pertinent.
1° : La position  =
= /2 est une position d'équilibre instable. Si on abandonne l'échelle dans cette position sans vitesse initiale, elle y reste ! Il faut donc supposer que l'échelle est abandonnée en =/2 avec une vitesse angulaire non nulle mais très faible (négligeable).
/2 est une position d'équilibre instable. Si on abandonne l'échelle dans cette position sans vitesse initiale, elle y reste ! Il faut donc supposer que l'échelle est abandonnée en =/2 avec une vitesse angulaire non nulle mais très faible (négligeable).
2° : la méthode proposée pour obtenir l'équation différentielle n'est pas la plus simple. En absence de frottement, raisonner sur la conservation de l'énergie mécanique conduit de façon très simple au résultat.
Cela étant dit, on peut quand même s'en sortir par la méthode demandée. Tu as commis quelques erreurs :
1° : au niveau de l'accélération de G :
Je te laisse finir le calcul ; on obtient dans chaque cas une somme algébrique de deux termes, pas un seul comme tu as écrit.
2° : D'après le théorème de König, il est possible d'appliquer le théorème du moment cinétique par rapport à l'axe de rotation instantanée (Gy) même si le repère barycentrique n'est pas galiléen. Le moment du poids en G étant nul, cela donne :
Je te laisse continuer. IGy représente le moment d'inertie de la tige par rapport à l'axe (Gy).
Re,
Oolala, j'ai un peu honte je rectifie les dérivées de suite.
Ce qui fait donc :
-ma () = Rb
ma ( = Ra
Ensuite j'ai calculé le moment d'inertie de la tige et ai trouvé J=
donc
MGext = MGpesanteur+MGcontact en A + MGcontact en B
=0+
= Ra * a * cos - Rb * a * sin
Je me retrouve avec des signes différents des vôtres, pouvez-vous m'expliquer s'il vous plait.
une fois que je remplace le tout je me retrouve avec une équation que je n'arrive pas à simplifier, il y a de fortes chances d'erreurs :
D'accord avec tes expressions de RA et RB.
Pour le théorème du moment cinétique, les signes dépendent de l'orientation de l'angle (non précisée sur ta figure) et donc du sens positif choisi pour la rotation de la tige.
Avec ma convention de signe, la valeur initiale de vaut +/2 . Le sens positif de rotation choisi est le sens des croissant donc le sens de rotation des aiguilles d'une montre. D'où les signes des moments. Avec cette convention, la vitesse angulaire et l'accélération angulaire sont négatives. Il aurait peut-être été plus pertinent d'appeler l'angle au sommet B. Ainsi on aurait eu à étudier une augmentation de de zéro à/2 ; la vitesse angulaire et l'accélération angulaire auraient été positives ...
Je vous remercie de vos réponses.
J'ai un exercice similaire Tige qui chute le long d'un support horizontal : une tige de masse m, de longueur 2l. On considère qu'il n'y a pas de frottements aux niveaux des supports.
J'ai mis le schéma ci-après.
Comme première question, on doit déduire du théorème de centre d'inertie et le théorème du moment cinétique en G dans le référentiel barycentrique l'équation différentielle vérifiée par .
Et dans la correction, le TCI donne en projection :
m maisje ne comprends pas pourquoi ?
Merci.
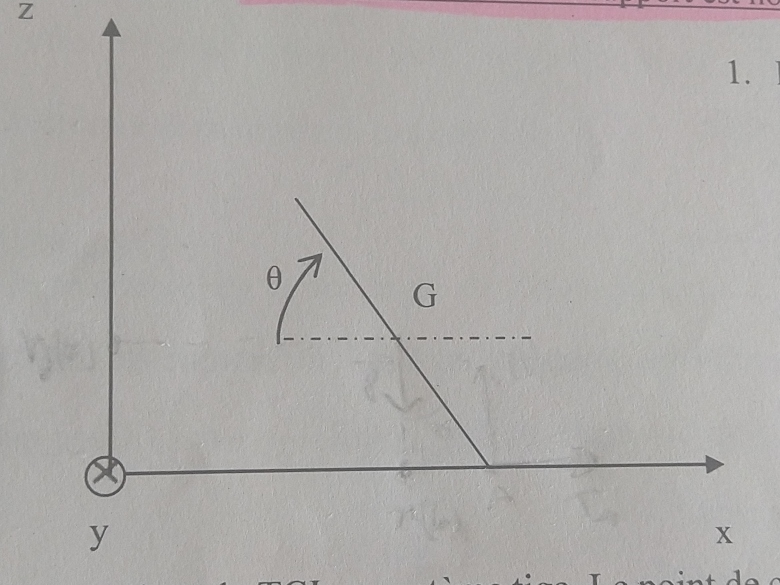
En absence de frottement à l'extrémité inférieure de la tige, la réaction du pan horizontal (Oxy) sur la tige est normale donc verticale. Les deux forces appliquées à la tige sont toutes deux verticales. Donc ?
Ah oui, bien-sûr,
sont de sens opposés, et s'annulent. J'en oublie les bases qui s'applique aussi dans ce chapitre "mécanique du solide".
Merci beaucoup.
sont de sens opposés, et s'annulent
"S'annulent" : non dans la mesure où la projection du vecteur accélération de G suivant (Oz) n'est pas nulle.
"S'annulent" : non dans la mesure où la projection du vecteur accélération de G suivant (Oz) n'est pas nulle.
 Je ne comprends pas.
Je ne comprends pas. Bonjour,
Voici un autre énoncé,
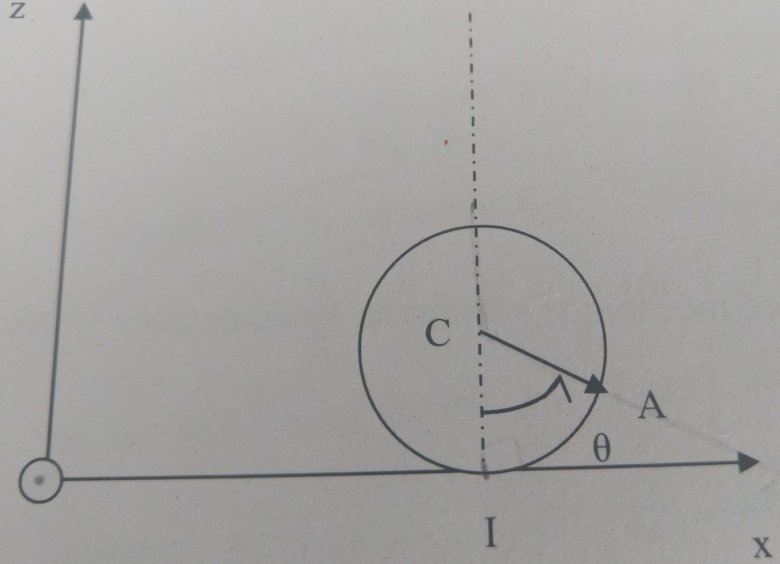
une masse M est fixé en A sur une roue qu'on assimilera à un disque homogène plein de masse m et de rayon R qui roule sans glisser sur un support. Le schéma est à la suite.
On me demande à partir du théorème de l'énergie mécanique de déterminer l'équation différentielle vérifiée par dans le cadre des petites oscillations.
Voici mon début de procédé :
= PextNC+PintNC
Em=Ec+Epint+Epext
Je calcule en Ec(syt)=Ec(disque)+Ec(A)
Ec(disque)=2 (J+mR), il me faudra calculer le moment d'inertie.
Ec(A) = 2
J'utilise Varignon pour le calcul de
qui fait intervenir :
d'où :
=
=
ensuite je devrais l'insérer dans Ec(A), mais ne me convaincs pas. Pouvez-vous m'apporter une aide svp, merci.
Remarque préliminaire : si les deux premiers exemples de mouvements étudiés étaient suffisamment proches pour appartenir à un même sujet, il aurait été plus clair pour ceux qui consultent ce forum d'ouvrir un nouveau sujet concernant ce problème...Ce sera pour la prochaine fois... 
Pour simplifier l'étude, il serait plus simple de commencer par établir la condition de roulement sans glissement. Cela s'obtient en considérant que le point à la périphérie du disque en contact avec le plan de roulement (cas t=0) est de vitesse nulle par rapport au repère absolu lié au plan de roulement. Cela conduit à une relation simple entre R, et Vc.
Pour l'énergie cinétique du disque : connais-tu le théorème de König sur l'énergie cinétique ?
Re,
Je ferai comme demandé pour les prochains exos.
Merci pour vos conseils, les notions sont là mais l'application aux exos faite par le prof est trop brouillonne à mes yeux du coup je m'y perds un peu.
Je vais reprendre votre cheminement, donc :
1- vitesse de Vc grâce au RSG
2- Oui je connais le th de König, il faudra l'utiliser pour l'Ec du disque si j'ai bien compris.
A tout de suite !
En utilisant la relation de Varignon tu peux établi l'expression générale de A qui va être utile pour l'énergie cinétique. En considérant que cette vitesse est nulle si =0 , on obtient la condition de roulement sans glissement.
Bonjour,
- condition de RSG:
varignon :
la vitesse au point I est nulle car contact avec la surface
d'où
donc condition de RSG =
Ec(disque)= (th de König)
avec Ec*= J
=
alors Ec(disque)=
Ec(A)=
et je calcule v(A) avec Varignon et v(C):
J'ai un problème de projection pour ??
D'accord avec ta condition de roulement sans glissement. D'accord aussi avec ton expression de l'énergie cinétique du disque. Sachant que le disque est homogène, cette expression se simplifie :
Concernant la vitesse du point A : les conventions d'orientation choisies sont un peu piégeuses au niveau des signes. Pour ne pas avoir de problème de signes en calculant les produits vectoriels, tu as tout intérêt à utiliser un repère orthonormé direct, ce qui conduit à orienter l'axe (Oy) vers l'arrière du plan de figure. Compte tenu du sens positif de rotation précisé sur le schéma, cela conduit à poser :
ce qui conduit à une vitesse de A dans le repère (Oxyz) :
En élevant au carré (je saute quelques intermédiaires de calculs) :
Remarque : tu peux constater que ces résultats sont bien cohérents avec le fait que la vitesse de A s'annule en .
Bonjour,
Je vous remercie. Cependant j'ai encore quelques soucis :
de signe, je trouve
ce qui n'est pas vraiment votre formule car vous obtenez un signe - pour le sinus.
Aussi pouvez-vous me détailler comment êtes-vous arriver à trouver cette forme de v^2(A) car je n'arrive pas non plus au même résultat.
Puis j'ai continué :
Epint=0; PNCint=0
Epext=Ep(disque)+Ep(A)=mgz(C)+mgz(A)=mgR+MgRcos(
)
PNCext=PNCcontact en I=RI.I=0 car MI=O contact ponctuel en I et
car RSG.
d'où
Il me restera à tout regrouper pour avoir je l'espère l'équation différentielle demandée.
La vitesse de A s'annule nécessairement en =0. Ton expression est donc fausse. Il y a plusieurs pièges au niveau des signes :
Vitesse de C égale à -R'.
Orientation du vecteur rotation instantanée...
Pour le carré de la vitesse : tu as juste à remarquer la somme du carré d'un sinus et du carré du cosinus du même angle...
Puisque la vitesse de I considéré comme appartenant au disque est nulle, la puissance instantanée de la réaction est nulle à chaque instant. La réaction ne travaille pas. Pas de difficulté donc pour l'énergie mécanique.

