Inscription / Connexion Nouveau Sujet
Mécanique du solide
Bonjour,
J'ai besoin de votre aide pur résoudre cet exercice.
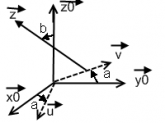
Une barre AB, homogène, de longueur 2.l est mobile relativement à un repère R0(o,x0,y0,z0). L'extrimité A est mobile sur le plan (0,x0,y0) et l'exrimité B est mobile sur l'axe (o,z0) : AB = 2.l.z ( voir la figure )
1/ Déterminer les éléments de réduction du torseur cinématique au point B,
2/ Calculer l'accélération du point A
3/ Déterminer l'axe central de ce torseur,
Si le point A est astreint à se déplacer sur l'axe (o,y0)
4/Déterminer l'axe central du torseur cinématique,
5/Déterminer la base et la roulante,
6/En déduire les axoides du mouvement de la barre dans R0
**************
Mes essais :
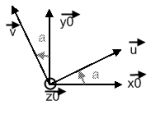
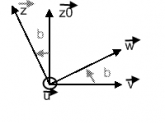
J'ai effectué les angles d'Euler
et
et ainsi on peut conclure que :
 (S/R0)= (dérivée de a) . z0+(dérivée de b)
(S/R0)= (dérivée de a) . z0+(dérivée de b)
Je ne peux pas continuer si c'est pas correcte.
Salut et merci d'avance 
Edit Coll : images placées sur le serveur de l'  Merci d'en faire autant la prochaine fois !
Merci d'en faire autant la prochaine fois ! 
![]()
J'ai vraiment besoin de votre aide
est-ce que déja l'expression du vecteur , la résultante générale, est correcte?
Merci
Puisque tu as entièrement déterminé le torseur cinématique au point , tu peux l'utiliser pour en déduire l'expression de la vitesse en
.
Il ne te reste ensuite qu'à dériver cette expression.
salut,
J'ai effectué le calcul de deux manières ,mais que qui m'énervec'est que je n'arrive pas au même résultat..
effectivement j'ai utilisé la relation du champs de vecteur d'un torseur.
Ainsi j'ai
d(OA)/dt|R0 =d(OB)/dt|R0 +(R/R0) BA
BA
On a BA = -2l.Z , (R/R0) = b.+a.Z0 , d(OB)/dt=-2l.[d(b)/dt].sin(b). Z0
Donc,
d(OA)/dt)|R0 = -2.l.[d(a)/dt].sin(b). +2.l.[d(b)/dt].cos²(b). -l.[d(b)/dt].sin(2b).Z
-l.[d(b)/dt].sin(2b).Z
d²(OA)/dt²|R0= d(d(OA)/dt|R0)|R + (R/R0)d(OA)/dt|R0
d(d(OA)/dt|R0)|R = (-2.l.d²a/dt².sinb-2.l.da/dt.cos b )
+(-4.l.db/dt.sin b . cos b +2.l.d²b/dt².cos²b)
+(-l.d²b/dt².sin(2b) - 2.l.db/dt . cos(2b)
(R/R0)d(OA)/dt|R0 = -2l.(da/dt.db/dt.sin²b.cos b + da/dt.db/dt.cos²b.cos)+
2.l(db/dt.sin(b).cos(b)-da/dt.cos(b).sin(b) )+
2.l( (db/dt)².cos²b+(db/dt)².sin²b).Z
et ainsi on fait la somme...
Par contre,
En applicant la relation directe pour calculer l'accélérationb :
a(A/R0) = ar(A)+ ae(A)+ ac(A)
il me semble que B est l'originie du repère R , la chose qui ma permis de conclure que :
ar(A) = d²(BA)/dt²|R = 0 ( parce que B et A sont fixe dans R )
ae(A)=d [(R/R0)]/dt|R0BA
ac(A)=2.(R/R0)dBA/dt|R
a(A/R0) = 2.l. d²(a)/dt²|R0 . sin(b).-2.l.(d²(b)/dt²|R0 +(d(a)/dt|R0)² .sin(b).cos(b). + 2.l.(d()/dt|R0)²+2.l.(d(a)/dt|R0)².sin²b . Z
+ 2.l.(d()/dt|R0)²+2.l.(d(a)/dt|R0)².sin²b . Z
Ainsi, je n'obtiens pas le même résultat...
une faute dans le calcul? je ne sais pas..
SVP, j'ai vraiment besoin de votre aide,..
Veuillez vérifier le calcul avec moi.
Merci!!
SVP, j'ai tellement besoin d'aide, si c'est fatigant à rédiger vous pouvez scanner votre brouillon et le poster sur le forum,..
Merci d'avance!
C'est déjà fatiguant à lire 
Plus sérieusement, je n'ai lmalheureusement le temps de reprendre tes calculs, je le ferai peut-être ce soir.
LCe que je peux dire c'est que les deux approches sont correctes. Cependant le point A est contraint à se déplacer dans le plan , l'accélération doit donc y être contenue (pas de composante verticale...).
Ton expression de l'accélération d'entraînement me semble par ailleurs incorrecte.
Pour une approche simple et éviter trop de produits vectoriels, tu peux poser dans un premier temps et dériver en te ramenant à un problème dans le plan horizontal. Tu pourras ensuite remplacer
et ses dérivées en partant de
.
J'essaierai de poster mes résultats pour les différentes approches plus tard.
Tu peux toujours continuer l'exercice.
Bonjour,
Ah, oui, vous avez raison concernant l'accélération d'entraiement, j'ai oublié l'expression de l'accélération du point coincidant : d²OB/dt²
J'ai vérifié ici
http://upload.wikimedia.org/math/0/3/1/0315b740f47c411807376aeb502c0f3e.png
( à Wikipédia A est l'origine du repère relatif et M le point mobile )
concernant l'accélération plane, pour mes calculs j'ai projeté dans la base (0,,,Z) , c'est pour cela il y aura de composante suivant Z, mais biensur nulle suivant Z0 .
Merci, espérant que tu pourras me refaire le calcul ce soir.
Merci encore
Merci pour ta méthode, je viens juste d'obtenir ceci :
http://img7.hostingpics.net/pics/352164A.gif
consuler le lien ( je viens de remarquer la remarque de ne pas poster des images sur le forum pour ne pas l'alourdir).
Mais je suis encore intéressée aux deux autres méthodes.
Merci beaucoup!
1. en posant
et
sachant que
ce qui doit donner au final:
(les accents graves sont censés être des points mais ils sont mal rendus, ils représentent bien sûr la dérivation par rapport au temps)
Concernant la formule de composition des accélérations, tu as pu constater qu'elle se résume à l'accélération d'entraînement:
avec
d'où, après avoir effectué les produits vectoriels:
et enfin:
, après de nouveaux calculs plus trépidants les uns que les autres :
En additionnant les trois termes ci-dessus, la composante selon doit disparaître et l'on doit obtenir l'expression de l'accélération de
(de préférence identique à l'expression trouvé dans mon précédent message, mais je te laisse vérifier...).
Ah, vraiment je te remercie pour ton grand effort afin de m'aider, Donaldos!!!
Merci, merci, merciiiiiiiii

