Inscription / Connexion Nouveau Sujet
Le crayon équilibriste.
Bonjour,
Le problème canne à pommeau auquel Coll a répondu me fait penser à une petite expérience ... à tenter.
-----
On prend un objet assez long mais de faible section, par exemple un crayon ou une latte ou ...
On soutient l'objet horizontal en plaçant les index des 2 mains sous l'objet (représentés par les ronds rouges sur mon dessin).
On rapproche ensuite les index l'un de l'autre (pas trop vite ... sans plus).
On peut soit ne bouger qu'un doigt, soit les 2 simultanément, soit l'un et puis l'autre ...
On peut partir avec les doigts symétriques par rapport au centre de gravité de l'objet (dessin du haut) ou bien (dessin du bas) avec les distances des doigts bien différentes l'une de l'autre par rapport au centre de gravité de l'objet ... mais bien entendu, au départ un doigt à gauche et l'autre à droite de G.
Le but est de prédire (donc avant d'essayer) si l' objet va ou non tomber bas des doigts lors de leur "rapprochement" jusqu'à se toucher.
Ensuite faire l'expérience ... et si on n'a pas le résultat attendu ... expliquer pourquoi.
S'il y a des amateurs ... blanker les réponses SVP.

tout dépend de la surface en contact, des frottements, dela vitesse relative des deux doigts, de l'homogéité de l'objet, de la répartition des masses, ...
tout dépend de la surface en contact, des frottements, de la vitesse relative des deux doigts, de l'homogénéité de l'objet, de la répartition des masses, ...
As-tu essayé ?
Sans chercher compliqué, avec un crayon ou une latte par exemple.
Et pour le mouvement des doigts ... peu importe.
Un seul en mouvement ou les deux ou l'un puis l'autre ...
Doigts au départ décalés ou non par rapport au centre de gravité de l'objet.
Le résultat devrait être le même.
Merci bamboum, cependant ...
L'objet tombera si un des doigts dépasse le milieu du crayon (centre de gravité)
Le mieux est d'essayer, dans les conditions données par l'énoncé.
... Et tu verras que la situation que tu décris n'arrivera pas.
On doit bien partir avec les doigts de part et d'autre du milieu du crayon ...
Et libre à toi d'essayer (sans donner des chocs dans le mouvement) de déplacer un doigt (en gardant le crayon horizontal) pour tenter de les avoir tous les 2 d'un même coté du milieu du crayon.
Tu ne devrais pas pouvoir y arriver.
Une expérience devrait toujours commencer par quelques "essais" pratiques.
Le probleme est bien plus interessant que ce qu il parait au premier abord. L experience montre que les doigts ne peuvent pas depasser le centre de gravite. Il y aurait une etude theorique a faire tenant compte de la position des doigts, des reactions d appui et des forces de frottement.
Oui JoseManuel,
C'est, en effet, plus intéressant que ce qu il parait au premier abord.
Dommage que le topic n'est pas eu plus d'intérêt ... jusqu'à présent.
Bonjour,
J'ai tenté une modélisation en utilisant les lois de Coulomb sur les frottements solides et en considérant que le coefficient de frottement est le même au niveau des deux contacts. On montre alors assez simplement que l'accélération de G,centre de gravité de la latte, est toujours orienté vers l'index qui est le plus éloigné de G. L'accélération de G étant j'imagine toujours très faible, cela me semble indiquer que G se déplace toujours vers le contact le plus éloigné et reste ainsi entre les deux contacts ; la règle ne tombe pas !
remarque : en fait, je suis plutôt sûr de moi pour les calculs mais pas tout à fait sûr de moi pour la conclusion...

Bonjour,
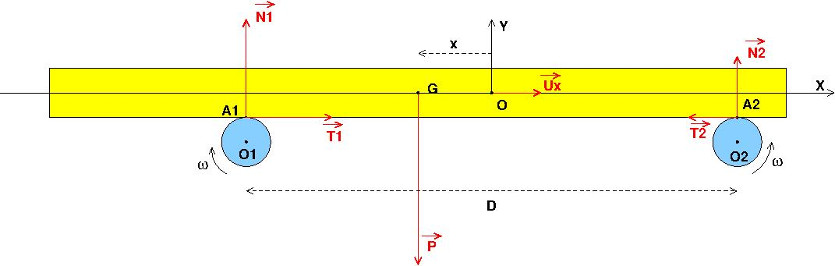
Cette expérience me fait penser à un dispositif assez ancien destiné à mesurer les coefficients de frottements solides. On remplace les deux contacts par deux cylindres identiques, d'axes parallèles perpendiculaires au plan de figure et distants de D. Les deux cylindres sont entraînés à la même vitesse angulaire constante  mais en sens inverses. On pose sur les cylindres, sans lui donner de vitesse initiale, une tige (ou poutre...) très peu épaisse de masse m, de longueur supérieure à D, de façon que son centre de gravité ne soit pas à égales distances des deux cylindres (x0
mais en sens inverses. On pose sur les cylindres, sans lui donner de vitesse initiale, une tige (ou poutre...) très peu épaisse de masse m, de longueur supérieure à D, de façon que son centre de gravité ne soit pas à égales distances des deux cylindres (x0 0 ).
0 ).
Imaginer sans faire de calcul le mouvement ultérieur de la tige.
Si la théorie vous tente : comment déduire de l'étude du mouvement la valeur du coefficient de frottement ?