Inscription / Connexion Nouveau Sujet
Forces et positions
Bonjour,
Actuellement je travaille sur un projet d'ergonomie.
Des données ont été recueillies suite à des essais menés en réalité.
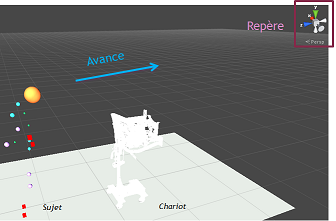
Voici les essais réalisés : Un sujet pousse/tire un chariot. Le chariot est composé d'un capteur de forces et de roulettes.
Les données recueillies sont :
- positions de différentes parties du sujet et du chariot
- forces exercées pour manipuler le chariot (au niveau du capteur placé sur la poignée)
J'ai importé ces données dans un logiciel de simulation (réalité virtuelle). J'ai associé les positions dans le temps à un modèle 3D. Maintenant mon but est de retrouver les efforts exercés sur le chariot grâce à ma simulation. Ensuite je comparerai ces résultats aux forces enregistrées lors des essais (grâce au capteur).
Jusqu'à présent j'ai utilisé deux formules :
- F = m*a - Ff
F : force exercée sur le chariot (capteur) / m : masse du chariot (on a indiqué 80kg) / a : accélération (a= dV/dt) / Ff : force de frottement (Auriez vous une idée de sa valeur?)
- F = P/V
P : puissance (P= dEc/dt et Ec = (m/2)*V2) / V : vitesse (V= dposition/dt)
Les positions prises en compte sont celles provenant des données enregistrées lors des essais menés en réalité.
Avec ces formules je ne suis pas parvenue à trouver des valeurs de forces cohérentes. Je pense donc m'être trompée dans leur calcul ou dans les formules...
Connaîtriez-vous d'autres formules pouvant m'aider à calculer les forces ?
Merci par avance 
Salut,
A première vue, il manque des composantes à ton bilan des forces :
* le poids
* la réaction du support => F = ?
A moins que ton support soit rigoureusement horizontal ?
Quelle est la nature de ton support, tu peux alors en déduire le coefficient de frottement dynamique f.
Merci pour votre réponse.
Si j'utilise le coefficient de frottement, je devrais l'utiliser comme ceci :
F = (m*a)*coef
?
Le sol devait être une sortie de plastique, comme dans un atelier. Quelque chose qui glisse assez bien. J'ai vu sur internet des coef entre 0.005 et 0.01; cela vous paraît il cohérent ?
Encore merci.
Oui je me suis trompée...
La force se calculerait comme ceci : F = (m*a)-Ff
Avec la force de frottement : Ff = -m*g*coef
Est-ce correct ?
Tu parles en relation vectorielle ou en relation projetée sur un axe ?
Dans ce cas, quel est le repère choisi ?
Donc tu projettes ?
Mais par rapport à quel repère ?
C'est cela qui n'est pas clair dans ton raisonnement.

Oui mais lequel ?
Ce que je cherche à t'expliquer, c'est que si tu ne précises pas le sens de tes axes (Ox) et (Oy), tu peux avoir deux cas de figures :
* si ton axe (Ox) est choisi dans le sens du mouvement => a priori c'est ton cas de figure)
* ou dans le sens inverse.
Voilà tout 
Idem si l'axe (Oy) est choisi dans un sens ou dans l'autre, le poids peut alors être pris en compte positivement ou négativement.
Je suis désolée mais je ne sais pas comment faire un schéma ici...
Pourriez-vous m'indiquer la démarche à suivre ?
Sur Paint par exemple.
Ne pas dépasse les 80Ko.
Puis en-dessous du cadre où tu écris : tu as un bouton Img.
Quand j'utilisais cette valeur : Ff = -coef*(m*g)
C'était en prenant en compte cette formule : Ff = coef*Fn avec Fn = R (force normale = réaction du support) et en considérant que R = -P (poids)
Cela fait beaucoup d'approximations je crois... Mais je n'ai pas beaucoup de données pour faire autrement.
Mon but est de rechercher la force exercée par la personne, oui, pour déplacer le chariot.
Mais lequel de f correspond à cette force ? C'est le F ou le f ?
Et que vaut l'autre f ?
Fans ce cas, tu sais quel est la anture de ton sol --> coefficient de frottement f = ?
Ensuite, il faut postuler sur l'accélération du chariot.
Tu peux par exemple faire une courbe de l'accélération en fonction de l'effort exercé sur le chariot.
Bonjour,
Suite à des essais expérimentaux (un homme pousse ou tire un chariot), voici les données recueillies :
- Des positions (trajectoires) en x y z : xz forment le plan de mouvement (avec z la composante principale) et y le composante normale
- Des forces : Fx Fy Fz : le repère du capteur de forces correspond au même que celui des positions, mais la composante principale est x ici (le capteur de forces est placé entre la poignée de manipulation du chariot et le chariot lui-même).
Jusqu'à maintenant je calculais l'accélération à partir d'uniquement des données de positions provenant de la composante principale soit z. Ensuite j'utilisais cette valeur dans une formule afin de calculer les forces. Ensuite je comparais ce résultat à la valeur des forces selon x donc.
Désormais je souhaite intégrer les deux composantes du plan de mouvement; dois-je faire comme ceci :
- racine carrée (x2+z2)
ou
- (x+y)/2
(avec x et z les valeurs des positions selon respectivement les axes x et z)
Et si j'intègre les deux composantes du mouvement pour les positions, dois-je faire de même pour le capteur de force ? Si oui, quelles formules dois-je utiliser ?
Merci
*** message déplacé ***
Le message (tu as créé un nouveau topic pour le même sujet, ce qui n'est pas autorisé) que tu as posté à 14 h 00 a été déplacé ici, c'est-à-dire quelques messages plus haut ; à la suite du début de ce problème.

Pourtant mon message je l'ai posté à ce lien :
https://www.ilephysique.net/forum-sujet-276267.html
et non ici qui est le lien :
https://www.ilephysique.net/sujet-forces-et-positions-275373.html#msg2297432
Et ce sont deux sujets distincts.
Là c'est Forces et positions
Et mon nouveau c'est Accélération

