Inscription / Connexion Nouveau Sujet
Fonctionnement d'un TMD
Bonjour,
Voici un exercice de mécanique.
La minimisation des oscillations provoquées par le vent dans les gratte-ciels a récemment débouché sur la mise au point de systèmes asservis appelés "Tuned Mass Damper" = TMD. Un TMD est un oscillateur placé en sommet de structure, et dont les oscillations sont couplées à celles de la structure de telle sorte à minimiser ces dernières.
---Modélisation de l'élasticité transverse d'une tour
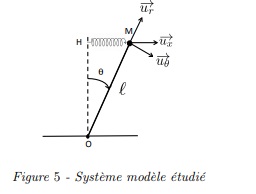
On considère une tour comme une tige rigide sans masse de longueur l constante:
-fixée au sol par son extrémité basse grâce à une liaison pivot parfaite O, telle que la tige peut tourner sans frottement autour de O (on note (t) la position angulaire de la tige par rapport à la verticale et on associe à cette position angulaire une base (
(t) la position angulaire de la tige par rapport à la verticale et on associe à cette position angulaire une base ( r,)
r,)
-à laquelle est fixée, en son extrémité haute, une masse m. On note M la position de cette masse.
1) Si l'on note (r,) les coordonnées polaires, rappeler les expressions générales des vecteurs position, vitesse et accélération en coordonnées polaires. Adapter ces expressions générales et exprimer dans la base polaire (r,) la vitesse et l'accélération de m en fonction de l et des dérivées temporelles de (t) uniquement.
L'élasticité transverse de la tour tend à la ramener dans une position verticale si elle s'en écarte. Pour traduire cet effet, on admet que tout se passe comme si:
- la masse m est fixée à un ressort de constante de raideur k et de longueur à vide nulle
-ce ressort était fixé à son autre extrémité en un point H
- le point H était astreint à se déplacer sans frottement sur la verticale en pointillés de sorte que le ressort reste toujours horizontale ( comme sur le schéma si-après).
on note g l'intensité du champ de pesanteur, supposé vertical, uniforme et descendant.
2) Exprimer HM du ressort en fonction de l et . En déduire l'expression de la force de rappel exercé par le ressort sur la masse m. Projeter cette force sur la base (r,)
On admet que l'action de la tige Ft sur la masse est telle que Ft=Ftr. A part cette force, le poids et l''action du ressort, on considère qu'il n'y a aucune autre force sur m.
3) Sur un schéma, faire figurer les forces qui s'appliquent sur m. Projeter le principe fondamental de la dynamique à m selon  et déduire l'équation différentielle vérifiée par (t).
et déduire l'équation différentielle vérifiée par (t).
Comme on considère que des oscillations transverses de faible amplitude (une dizaine de centimètres pour une tour d'une centaine de mètres de haut), l'approximation des petits angles est pertinente.
4) Simplifier l'équation du mouvement si on considère que (t) reste petit. On rappelle que sin et cos1 dans ce cas. Vérifier que si kl-mg>0, on se ramène à l'équation d'un oscillateur harmonique dont on précisera la pulsation propre
et cos1 dans ce cas. Vérifier que si kl-mg>0, on se ramène à l'équation d'un oscillateur harmonique dont on précisera la pulsation propre  0.
0.
5) En supposant que la condition précédente est vérifiée, on considère une situation correspondante à une secousse brusque où (t=0)=0 et =
. Déterminer
(t) et en déduire la position angulaire maximale max atteinte par la tour en fonction uniquement de et
0.
---Etude du système {tour,TMD}
On adjoint à la tour étudiée précédemment un TMD. On admet que l'action du TMD sur la tour est assimilable à une force de frottement fluide supplémentaire de la forme Ff=- v où v est la vitesse de m qui s'applique sur m.
v où v est la vitesse de m qui s'applique sur m.
6) Etablir la nouvelle équation différentielle vérifiée par (t).
7) Simplifier cette nouvelle équation dans l'approximation des petits angles. Toujours en supposant que la condition kl-mg>0 est vraie, vérifier qu'elle peut se mettre sous la forme canonique : +
=0 où l'on précisera l'expression de Q. Quelle est la signification physique de cette grandeur ? Commenter ses dépendances en
et en masse m. Avec les mêmes conditions que précédemment, que peut-on dire qualitativement de la valeur de l'angle maximale atteint dans ce cas, ' max ? Quel est l'intérêt du TMD ?
Voici mes réponses:
1) ok cours
adapter ces expressions dans :
on a
or l=cte donc alors
2) HM= l sin
Force de ressort = -kx, est-ce Fr= -klsin ?
sur ux, -kx et sur u, 0
3) Forces subies par tige Ft, Fr et P, or P et Ft s'annulent donc Fr=ma
et ensuite on me dit projection sur u, or pour moi Fr est nulle je ne comprends plus.
Bonsoir
Pourrais-tu joindre un scan du schéma S.T.P. ? Cela aiderait à comprendre les notations et les orientations...
Sans être sûr des orientations, je peux quand même affirmer que, si l'action du ressort est horizontale, ses composantes sur ur et sur u ne sont pas nulles dans le cas général d'un angle non nul; il en est de même des composantes du poids de la masse m.
Bonjour,
J'ai mis le schéma en pièce jointe. D'après votre réponse, j'avais compris cette chose qui est fausse donc : une force qui est horizontale n'a pas de composante sur l'axe verticale par exemple, par contre si elle fait un angle avec l'horizontale, elle a bien sûr une composante sur l'axe verticale. Vous avez donné aussi l'exemple du poids et justement les composantes, je les donne quand il n'est pas complètement à la verticale.
Merci pour le schéma ; les choses sont claires maintenant : le poids et la tension du ressorts ont bien, dans le cas général, des composantes non nulles suivant ur et suivant u.
Bonjour et me revoilà,
Peut-être un peu moins fatiguée
2) HM=l*sin
Projection de force de rappel du ressort sur:
3) 
selon :
+mgcos
-ml=0
puis avec approximation des angles petits:
Ensuite que veut-on dire par vérifier si kl-mg>0
Les premières équations que tu as écrites constituent une véritable horreur !
Un vecteur ne peut être égal qu'à un autre vecteur !
Il te faut aussi revoir les projections des vecteurs forces sur u. Une petite astuce pour éviter les confusions entre sinus et cosinus : teste tes formules dans des cas simples : =0 par exemple : Il est clair ici que pour =0, le poids n'as pas de composante suivant u...
Ensuite : pour que la tour puisse revenir vers sa position d'équilibre verticale (=0) l'accélération angulaire doit être de signe opposé au signe de . Fais quelques schémas pour t'en convaincre...
Re,
Oui j'ai un peu de mal en projection, il faut que je fasse encore un petit schéma.
Donc en reprenant bien posément sur
ce qui m'amène à klsin+mgsin=ml
avec approximation des angles :
(kl+mg)=ml
Je me rapproche presque de ce qu'on me demande mais avec un "-", je ne comprends pas d'où il sort ?
Il vaudrait mieux écrire :
car le vecteur poids n'est pas colinéaire au vecteur unitaire
. Tu te limites ici à l'étude de la projection du poids. La force exercée par le ressort est une force de rappel orientée suivant
si
> 0 ; c'est une force de rappel. En toute rigueur, il faut écrire :
Ensuite, tu peux bien sûr simplifier comme demandé par l'énoncé...

