Inscription / Connexion Nouveau Sujet
Devoir de mécanique contrôle connaissance
Bonjour, j'ai tenté de résoudre un DS de l'an passé pour tester mes connaissances et j'aimerais savoir si quelqu'un peut y jeter un oeil ?
Merci d'avance pour toute aide.
liens :
https:/****
https://*****
Cordialement.
Bonjour
Le règlement du forum demande de copier l'énoncé sauf si sa longueur est supérieure à une page.
Bonjour à vous deux,
non, lidlkidjoe, un exercice fait moins d'une page...et ***1 sujet=1 exo***
tu n'es pas nouveau, tu le sais
Pour les images autorisées

Pour une meilleure lisibilité du forum, il est demandé de créer un sujet par exercice.
Pour l'exercice 1 : tu peux scanner le schéma et le poster ici. L'énoncé fait 9 lignes...


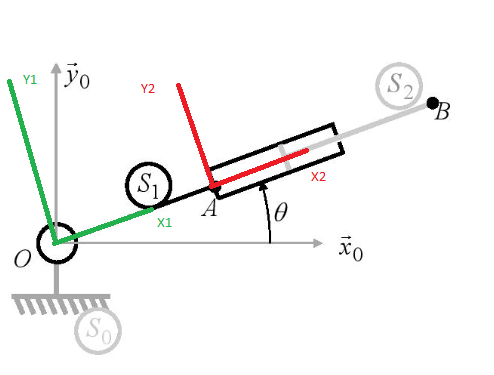
Données :
Soit un robot partie (1) tourne autour d'un axe fixe ( O,)
La partie (2) translate par rapport à (1) suivant l'axe (O,)
Questions :
1) Positionner les repères liés à chaque solide.
2) Exprimer le vecteur rotation (1/0) et
(2/0)
3) Exprimer le vecteur vitesse ( par rapport à ) du point A
4) Exprimer le vecteur vitesse ( par rapport à ) du point B
5) Exprimer le vecteur accélération ( par rapport à ) des points A et B
Pour la vitesse de B, tu peux regrouper deux termes mais tes résultats sont corrects.
à noter :
Les deux vecteurs rotations instantanées sont égaux à chaque instant car S2 est en translation par rapport à S1 : donc :
Merci Vanoise, j'ai effectivement noté les détails sur ma copie mais je suis lent en latex du coup ici je mets l'essentiel.
Je trouve la suite de l'exercice imprécis. Il n'est écrit nulle part que la rotation est uniforme ( : constante). Cependant, ton énoncé précise que x est une fonction du temps sans rien dire de tel à propose de
. Il serait peut-être bon d'exprimer les accélérations en tenant compte de l'accélération angulaire
. De toutes les façons, cela te fera un bon entraînement...
code tex possible :
pour la vitesse angulaire : \dot\theta :
pour l'accélération angulaire : \ddot\theta :
malou edit > nettement mieux, mais bon, tout le monde sait que je ne suis pas physicienne 
J'ai donné l'expression de l'accélération de B/ R_o dans le message de 16h53 , j'ai juste oublié la flèche du vecteur sur a. Pourrais-tu me dire si cette dernière est correcte ? Merci
Plusieurs messages se sont croisés et j'avoue avoir "zappé" celui de 16h53. Mon message de 17h26 est donc inutile.
Je suis d'accord avec ton expression de l'accélération de B.
Dernière précision : le terme me semble juste homogène à des
. je dois mal saisir quelque chose.
Merci beaucoup en tout cas pour ton aide Vanoise.
: homogène à une vitesse, mesure en m/s
: homogène à une vitesse angulaire ; s'exprime habituellement en rad/s mais le radian est une unité de dimension 1 (on dit aussi parfois une unité sans dimension) car le radian se définit comme un rapport de deux longueurs. Une vitesse angulaire a donc la dimension physique de l'inverse d'une durée.
Au final : la dimension de est celle d'une longueur divisée par le carrée d'une durée.
a bien la dimension d'une accélération !

