Inscription / Connexion Nouveau Sujet
Cinématique du solide
Bonjour. Svp j'ai besoin d'aide.
Soit un cylindre de rayon a et de hauteur h. Le cylindre se déplace dans un référentiel R( O, ,
,
) et le mouvement de son centre de masse G obéit à la loi x1= 2t y1=4t2 et z1=2. Soit R1(G,
,
,
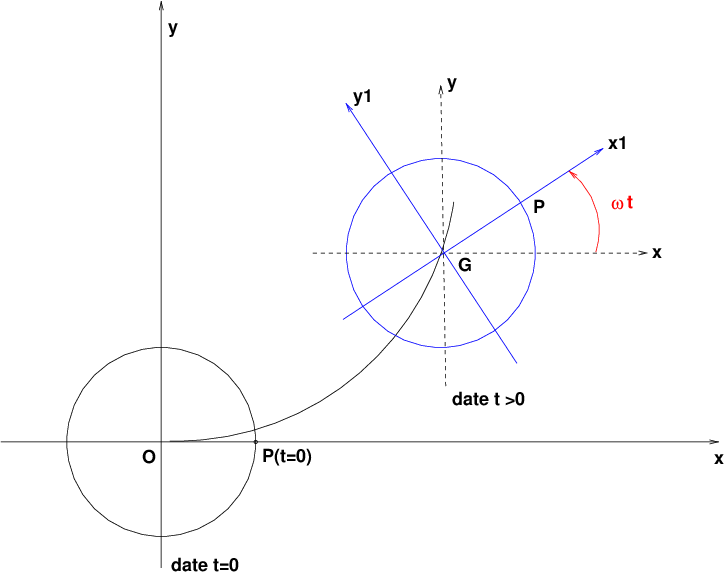
) le référentiel lié au cylindre. Les vecteurs k et k1 sont colinéaires. On considère un point P situé sur la périphérie du cylindre. Le cylindre tourne autour de l'axe (O, k) avec une vitesse de rotation constante w.
A l'instant t=0, le point P se trouve sur l'axe Ox, les points O et G étant confondus. On considère le point P1, projection orthogonale de P sur la base inférieure du cylindre. On admet que les axes Ok et Gk1 sont toujours parallèles et qu'à t=0, les angles (i, i1)=(j, j1)=0.
Déterminer
1- Le torseur des vitesses.
2- Le vecteur vitesse d'un point P du solide dans le référentiel (O, i, j,k)
3- L'accélération du point G dans le référentiel (G, i1, j1, k1)
4- Le vecteur position GP1 dans les référentiels (O, i, j,k) et (G, i1, j1, k1).
5- Le vecteur vitesse du point P1.
Bonjour
Il faut que tu scannes et postes ici le schéma. Explique aussi ce que tu as fait et ce qui te bloque. Plus facile de t'aider efficacement ensuite en fonction de ton niveau.
Bonjour
Il faut que tu scannes et postes ici le schéma. Explique aussi ce que tu as fait et ce qui te bloque. Plus facile de t'aider efficacement ensuite en fonction de ton niveau.
Il n'y a pas de schéma. Je n'arrive pas à ressortir les coordonnées de P afin de répondre à la deuxième question
Poste au moins un scan du schéma que tu as fait. C'est indispensable pour contrôler les orientations.
Poste au moins un scan du schéma que tu as fait. C'est indispensable pour contrôler les orientations.
Je n'arrive pas à le faire. D'ailleurs même que je ne comprends pas comment à l'instant initial le point P se trouve sur l'axe Ox et les points O et G sont confondus.
D'ailleurs même que je ne comprends pas comment à l'instant initial le point P se trouve sur l'axe Ox et les points O et G sont confondus.
Tu as raison : il y a une incohérence dans l'énoncé car imaginer que les points O et G puissent être confondus à un instant donné est incompatible avec l'indication z1=2 = constante en supposant bien sûr que (x1,y1,z1) soient les coordonnées de G dans le repère R.
Soit on suppose que , à t=0, le projeté de G dans le plan (O,
 ,
, ) se confond avec O, soit on pose tout simplement z1=0 au lieu de z1=2.
) se confond avec O, soit on pose tout simplement z1=0 au lieu de z1=2.
Il est tout de même étonnant qu'aucun schéma n'accompagne un tel problème !