Inscription / Connexion Nouveau Sujet
Capteur de vibrations
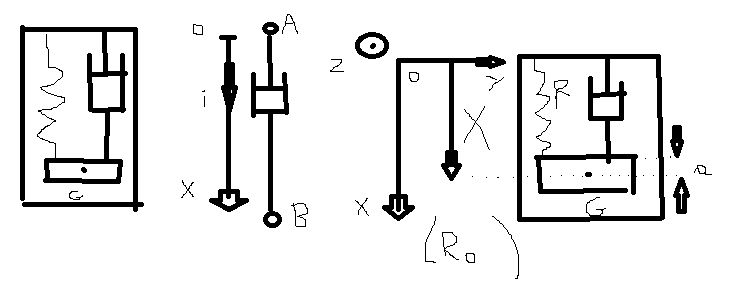
Un capteur comprend un support et une masse m reliee au support par un ressort R (rigidite k, longueur au repos Lo) et un amortisseyr A(constante h) disposes en parallele. La masse de centre d'inertie G ne peut se deplacer que verticalement. Le support, le ressort et l'amortisseur ont une masse negligeable.
Rappel: si les extremites A et B d'un amortisseur se deplacent avec les vitesses respectives x'a et x'b, l'amortisseur exerce sur le reste du ysteme lie a A et B, en A une force h.(x'b-x'a)i et en B une force h(x'a.x'b)i, i etant le vecteur unitaire de l'axe de deplacement.
1.Le support est immobile par rapport a un repere Galileen (Ro).
1.1 Exprimer l'abscisse xo du centre d'inertie a l'equilibre. (xo=mg\k+lo)
1.2 Ecrice l'equation diff du mvt de la mase, ecartee de sa position d equilibre, Que devient cette equation si on pose x=xo+X?
Du coup j'ai un soucis car quand je pose le pfd, les forces de frottement s'annule et j'aurait la meme equa diff qu'a l'equilibre. Merci de votre aide.