Inscription / Connexion Nouveau Sujet
Asservissement en position
Bonjour,
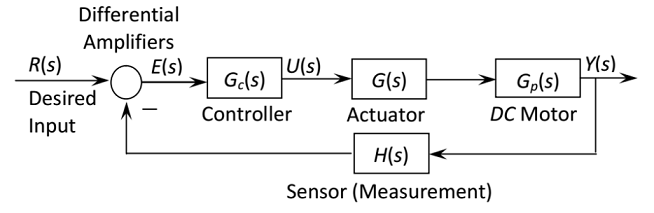
Je suis en train de travailler sur un projet consistant a concevoir un systeme pour asservir en position un moteur a courant continu. On me demande de relever les fonctions de transfer de l'actionneur , de celui du moteur, de capteur et de controlleur. Je suis un peu perdu . Pourriez-vous me rendre service ? J'ai besoin de vos idées.
Merci d'avance
Par exemple pour un moteur DC à aimant permanent, commencer par comprendre le contenu de ce lien : ![]()
Ici, on demande de "relever la fonction de transfert", il faut donc faire les essais pratiques nécessaires pour y arriver ...
En général, on peut soit trouver la fonction de transfert à partir des datasheets 'feuilles de caractéristiques" du composant.
Par exemple pour le moteur, trouver les valeurs de L, R, KE et J.
- Soit : dans la datasheet si on en dispose et si elle fournit ces caractéristiques.
- Soit : en pratiquant des essais pratiques sur le moteur pour mesurer ces caractéristiques.
Même procédure pour les autres composants ...
Sauf distraction. 
Hello
Peux tu nous en dire plus sur ton projet? Les questions qui te sont posées? Ce qui te perturbe? Parce que là, a part recopier les généralités d'un cours d'automatique ... (ce qui explique peut être l'absence de réponse jusqu'à présent)
J-P, dirac--> Les characteristiques du moteur ont été relevées experimentalement . Les sets qui se trouve dans les labo me servent d'exemples pour le projet. Par exemple, comme actionneur un amplificateur de puissance s'utilise. Mais le probleme qui se pose comment trouver la fonction de transfer d'un tel amplificateur. Ou bien peut-on se servir d'un autre actionneur comme circuit de H-pont .Apres avoir trouvé les fonctions de transfer du moteur ,d'actionneur, et de capteur qui constitue le feedback de la boucle fermée, on va utiliser la methode de lieu de racines pour determiner le type de controlleur comme PID par exemple. Mais tout ça est tres ambigu en ce moment et je suis bloqué , il faut que je me mette sur mes rails.
Mais le probleme qui se pose comment trouver la fonction de transfert d'un tel amplificateur ?
- Soit théoriquement à partir du schéma de montage et des caractéristiques des composants.
- Soit pratiquement, en attaquant l'ampli (chargé) par une tension sinusoïdale connue à fréquence ajustable et en mesurant la tension de sortie (amplitude et déphasage par rapport à l'entrée) et ...
Et bien je ferais tout ce que je t'ai dit.
- Trouver sur datasheet ou par mesures les caractéristiques du moteur (L, R , KE, J) ... et j'en déduirais l'expression de Gp
- Trouver sur datasheet ou par mesures les catactéristiques de "l'actuator" comme je l'ai écrit dans un message précédent et en déduire l'expression de G
- Trouver sur datasheet ou par mesures les catactéristiques du controller et en déduire l'expression de Gc
- Trouver sur datasheet ou par mesures les caractéristiques du sensor et en déduire l'expression de H
Remarque :
Il est possible qu'au lieu de déterminer les caractéristiques d'un controller existant, qu'il faille les déterminer pour que le système réponde aux attentes (précision, rapidité, stabilité).
Si c'est le cas (très probable), il faudra alors réaliser pratiquement un "controller" correspondant à ce qui a été déterminé ci-dessus.
Rebonjour,
On a experimentalement determiné que l'actionneur du systeme est un amplificateur de puissance qui retient le voltage a un niveau constant a 12V et qui varie le courant entre 0 et 5A. J'ai échangé avec un chercheur en ce domaine a propos de ce sujet et il m'a dit que la fonction de transfer vaudrait 1 ce que j'ai trouvé bizarre. On est reelement en difficulté a vrai dire.... Pratiquement parlant, envoyer une tension sinusoidale dans un set se realise comment?
"l'actionneur du systeme est un amplificateur de puissance qui retient le voltage a un niveau constant a 12V et qui varie le courant entre 0 et 5A. "
Cela me semble bizarre.
Si l'amplificateur fournit le courant nécessaire (donc variable au cours du temps pour assurer le mouvement du moteur) au bon fonctionnement de la boucle, sa tension de sortie est obligatoirement variable (dépendant du courant et de l'impédance du moteur et de sa réaction d'induit).
Quels ont été les essais effectués sur l'ampli (schéma de montage) et quels en ont été les résultats ?
L'idéal serait de déterminer les diagrammes de Bode de chacun des composants de la boucle Controller, actuator ..
Personne ne pourra aider efficacement sans le schéma du montage ou bien sans un relevé CORRECT pratique de ces caractéristiques.
Rebonjour,
Nous sommes tournés en systeme numérique Ardinhuo Uno. Nous utilisons maintenant le Servo moteur SG90 et un potentiometre en presence d'Ardinhuo. Le montage de circuit sur le board est réalisé mais le probleme maintenant c'est de relever les characteristiques du systems : notre superviseur nous a demandé de savoir si le maintien d'ordre zero (ZOH) circuit a été integré ou pas? Donc la j'ai envoyé un email a la société de Towerpro pour les parametres du moteur et pour ZOH circuit. Pour le controlleur on a egalement besoin d'une programmation pour PID controlleur.. Tout ça est encore trop vague dans notre tete...

