Inscription / Connexion Nouveau Sujet
2 équations différentielles du mouvement
polaires
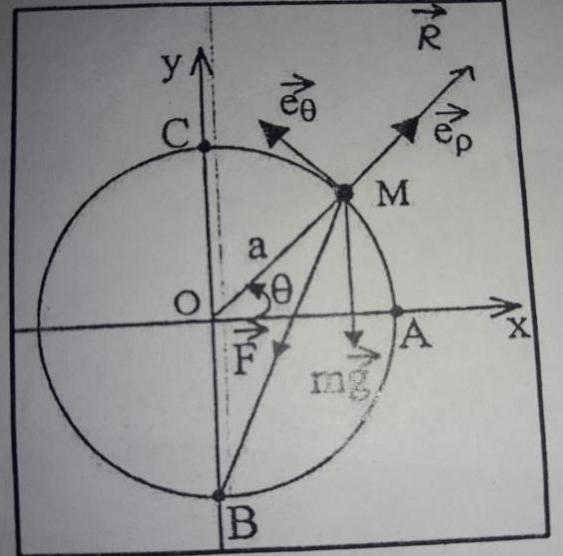
Un anneau schématisé par une particule M de masse m , peut glisser sans frottement sur un cercle de centre O et de rayon a , dans un plan vertical fixe (x,y) . À l'instant initial , il se trouve au point C avec une vitesse initiale quasi-nulle (voir figure).
En plus de son poids mg , il est soumis de la part du point B à une force d'attraction proportionnelle à la distance ||BM||vec , soit F vec = -kBM vec , k est une constante positive .
À chaque instant on repère la position de M dans le plan (xOy), supposé galiléen , par ses coordonnées polaires (a ,  (t) )
(t) )
1- Donner dans la base ( e , e )
, e )
les composantes des vecteurs vitesse et accélération du point M à l'instant t
2- En projetant le PFD dans la même base déterminer 2 équations différentielles du mouvement .
3 - intégrer par rapport à (t) l'équation différentielle suivant e en déduire alors la réaction R exercée par le cercle sur le point M en fonction de mg , a , k et l'angle (t) .
j'ai fait la première question
mais pour la deuxième je sais pas ce que je dois faire ?
qu'est ce qu'on veut dire par les 2 équations différentielles ?
Bonjour,
Peut être pourrais tu partager les résultats que tu obtiens à la 1ere question?
Une équation différentielle est une équation qui lie une fonction et ses dérivées successives. Ici en projetant sur les axes comme demandé, tu obtiens 2 équation liant
r, dr/dt, d2r/dt2, , d/dt, d2/dt2
Et bien sûr mon vecteur a n'est pas le a de l'énoncé (que je viens seult de lire  ) qui désigne lui le rayon du cercle ...
) qui désigne lui le rayon du cercle ...
La trajectoire étant d'ailleurs circulaire les dérivées successives de la 1ere coordonnée polaire (que j'ai appelée r) se déduisent rapidement )
Bonjour,
Peut être pourrais tu partager les résultats que tu obtiens à la 1ere question?
Une équation différentielle est une équation qui lie une fonction et ses dérivées successives. Ici en projetant sur les axes comme demandé, tu obtiens 2 équation liant
r, dr/dt, d2r/dt2,
, d/dt, d2/dt2j'ai trouvé pour la vitesse : V = Rwe
pour l'accélération j'ai trouvé -Rw^2 e
Bien sur ce qu'il faut projeter, c'est la relation vectorielle:
Cette projection est correcte ?
P = -Pe
F = -Rcos
e - Rsine
ok pour la vitesse
()
Par contre pour l'accélération tu fais l'hypothèse que (). Hum hum, pourquoi cela?
Tes projections de et
sur les axes posent également problème.
avec la relation de chgt de repère
Tu reprends?
ok pour la vitesse
(
Par contre pour l'accélération tu fais l'hypothèse que (
Tes projections de
Tu reprends?
Non j'ai pas fais ça
en dérivant la vitesse on obtient l'accélération et puis j'ai trouvé le résultat que j'ai déjà écrit
Pour les projections
si je projette premièrement sur l'axe xOy ça sera mieux et plus facile ?
Re hum hum
En coordonnées polaires:
avec dans le cas de cet exercice = a = constante
Concernant la projection sur les axes. Non il n'est pas nécessaire de revenir aux projections sur xOy, j'illustrais simplement ton erreur par un "test" simple sur le poids qui est colinéaire à Oy
Pendant que tu cherches à rectifier , je fais un crobard puis je partage avec toi
Re hum hum
En coordonnées polaires:
avec dans le cas de cet exercice
= a = constante
Concernant la projection sur les axes. Non il n'est pas nécessaire de revenir aux projections sur xOy, j'illustrais simplement ton erreur par un "test" simple sur le poids qui est colinéaire à Oy
Pendant que tu cherches à rectifier , je fais un crobard puis je partage avec toi
Franchement je suis perturbé maintenant
car dans le cours que j'ai appris tous ce que j'ai trouvé est correcte si le vecteur position OM = Re
on va trouver ces résultats en fonction de
en fonction de 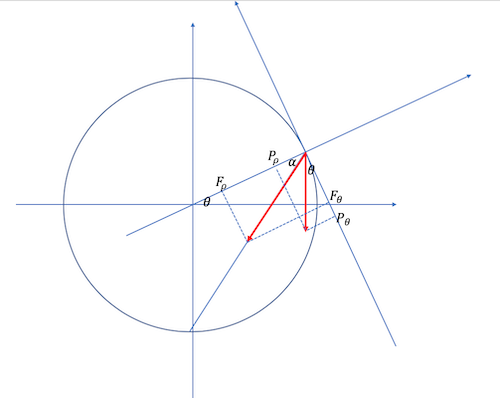
Franchement je suis perturbé maintenant
car dans le cours que j'ai appris tous ce que j'ai trouvé est correcte si le vecteur position OM = Re on va trouver ces résultats
Ben on n'a pas suivi les mêmes alors ....

Tu ne peux écrire l'accélération telle que tu l'as posée que si la vitesse de rotation est constante. Or ici on en est très loin
Pour te convaincre
Nous en étions donc à:
1/ donner les expressions des vitesse et accélération dans le repère mobile
2/ Projeter la RFD dans ce repère
avec
Et les propriétés géométriques suivantes:
et
Donc en projetant sur les 2 axes du repère mobile
(1)
(2)
3/ Trouver (t)
(2) peut s'écrire après avoir remarqué que :
(rassurant le k/m
 )
)
On cherche de la forme
Les conditions initiales conduisent à
avec
sauf distraction ou fatigue
Je laisse ouverte la détermination de R afin que dans un temps plus ou moins long, un de tes pairs pose ici la question

